

Airplane onboard GPS and inertial navigation system combined positioning method
An inertial navigation system and combined positioning technology, which is applied in the field of aircraft airborne GPS and inertial navigation system combined positioning, can solve problems such as the failure to combine GPS and INS technology, and achieve the effect of improving positioning accuracy and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
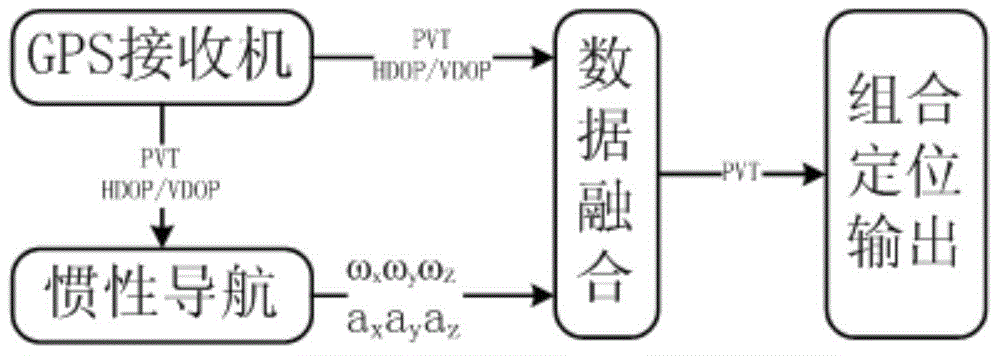
[0018] figure 1 Among them, is the principle diagram of GPS and inertial navigation combined positioning function of the present invention. As shown in the figure, PVT represents the position, velocity and time information output by the GPS receiver; the inertial navigation (referred to as inertial navigation or INS) output ωxωyωZ represents the three-axis angular velocity output by the inertial navigation system gyroscope, and the inertial navigation output axayaz represents the acceleration of the inertial navigation system That is, output three-axis acceleration, data fusion mainly includes GPS and inertial navigation weight design, and KALMAN data fusion.
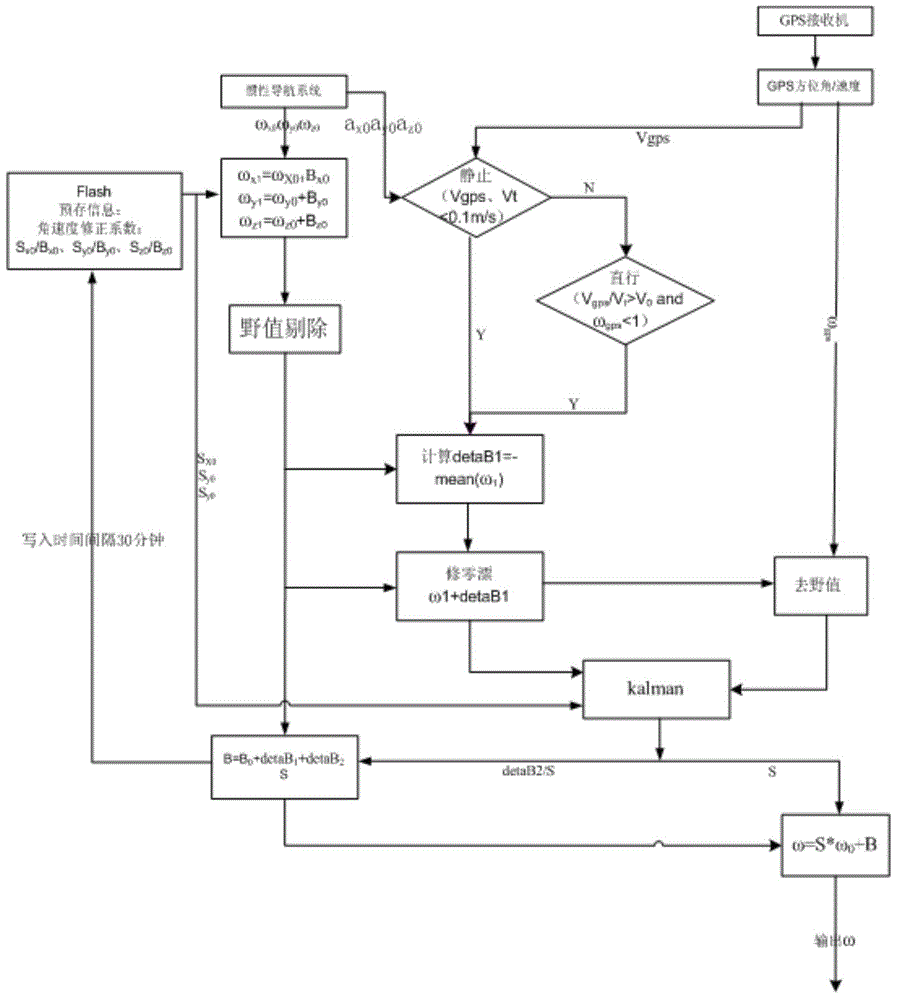
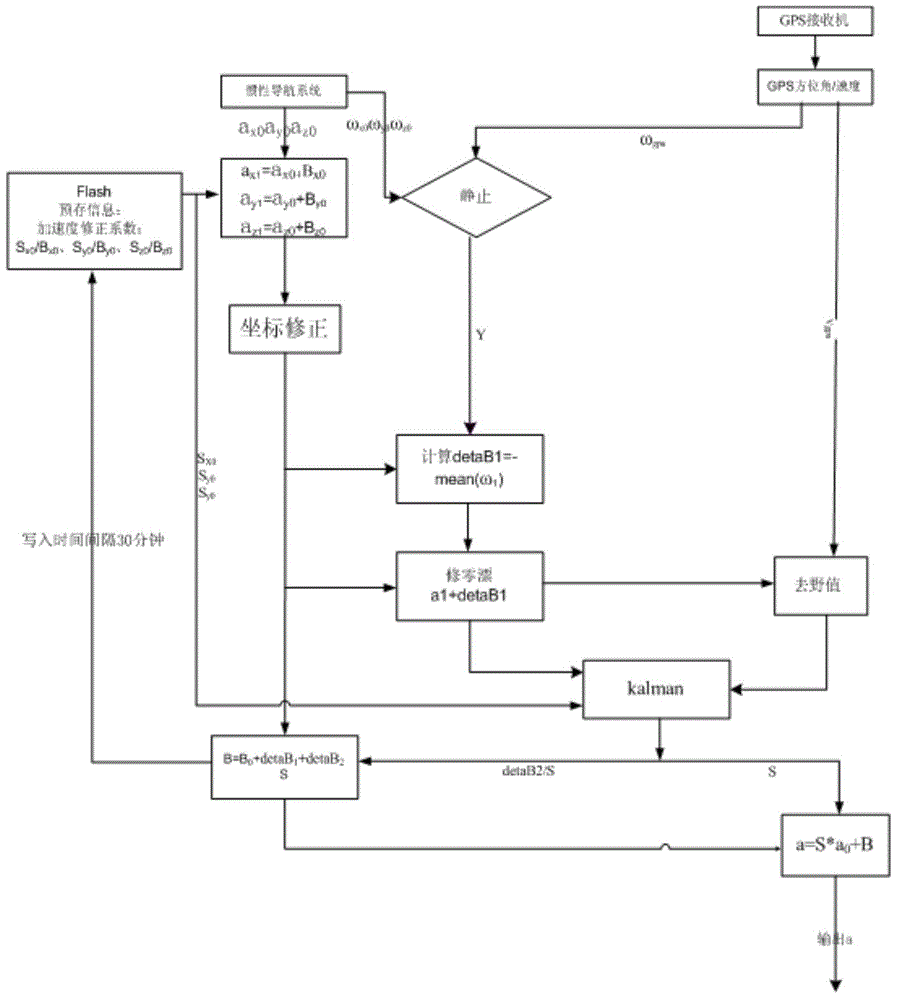
[0019] Figure 2 to Figure 4 Shown, relate to a kind of aircraft airborne GPS and inertial navigation system combined positioning method of the present invention, it comprises following construction steps:
[0020] a. Construct the inertial navigation angular velocity error model, and correct the inertial navigation a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More