Obstacle recognition method, device and equipment, medium and weeding robot
An obstacle identification and obstacle technology, applied in the computer field, can solve the problems of consuming manpower and material resources, increasing costs, limiting the shape of the weeding area, etc., to achieve the effect of improving the efficiency and accuracy of identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
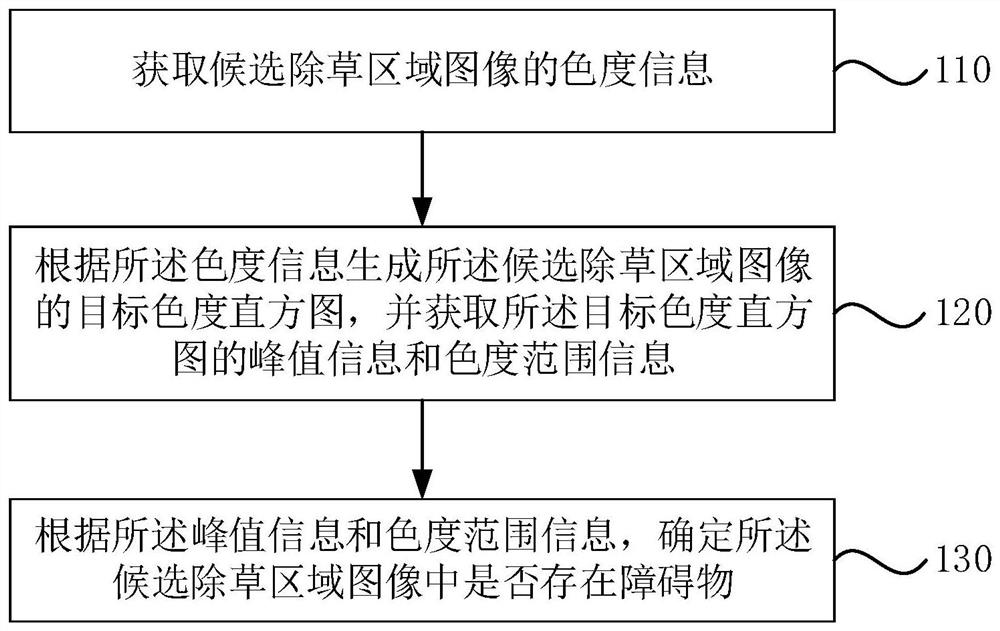
[0026] figure 1 This is a flowchart of an obstacle identification method provided in Embodiment 1 of the present invention. This embodiment is applicable to a situation where a weeding robot identifies an obstacle in a candidate weeding area. This method can be implemented by the obstacle identification device provided in the embodiment of the present invention. To perform, the apparatus may be implemented by means of software and / or hardware. see figure 1 , the obstacle identification method provided by this embodiment includes:
[0027] Step 110: Acquire chromaticity information of the image of the candidate weeding area.
[0028] Among them, the candidate weeding area is the possible working area of the weeding robot, which may be all weeds to be removed, that is, the weeding area; it may also be an obstacle area that is similar to the color of the grass, such as yellow or green cardboard or large leaves.
[0029] The image of the candidate weeding area may be captured...
Embodiment 2
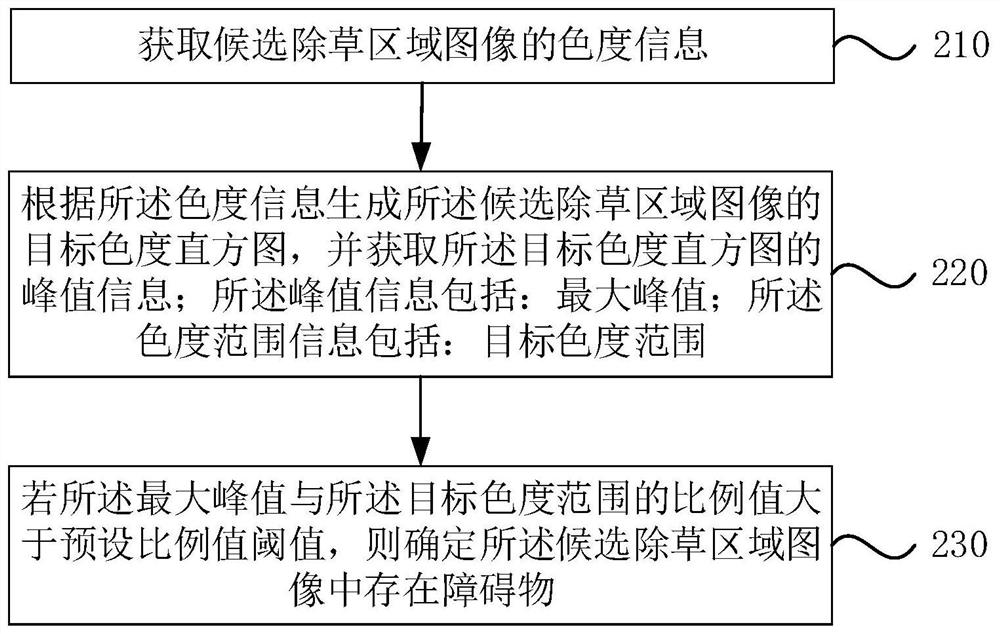
[0054] figure 2 This is a flowchart of an obstacle identification method provided in the second embodiment of the present invention. The technical solution is to supplement the process of determining whether there is an obstacle in the image of the candidate weeding area according to the peak information and the chromaticity range information. illustrated. Compared with the above solution, this solution is specifically optimized as follows: the peak information includes: the maximum peak value; the chromaticity range information includes: the target chromaticity range;
[0055] According to the peak information and the chromaticity range information, determine whether there is an obstacle in the image of the candidate weeding area, including:
[0056] If the ratio of the maximum peak value to the target chromaticity range is greater than a preset ratio threshold, it is determined that there is an obstacle in the image of the candidate weeding area. Specifically, the flowcha...
Embodiment 3
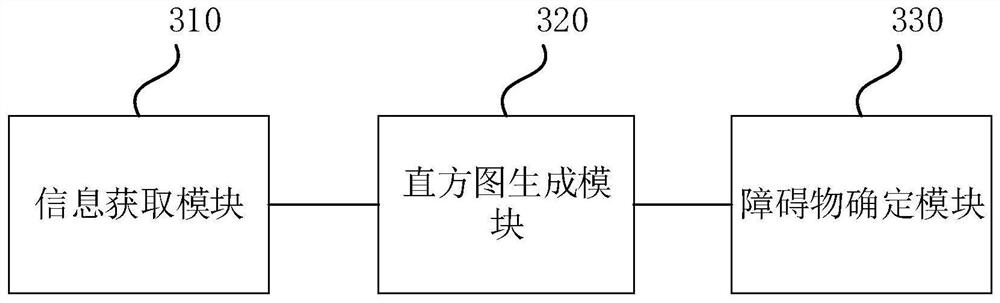
[0065] image 3 This is a schematic structural diagram of an obstacle identification device provided in Embodiment 3 of the present invention. The device can be implemented in hardware and / or software, can execute an obstacle identification method provided by any embodiment of the present invention, and has functional modules and beneficial effects corresponding to the execution method. like image 3 As shown, the device includes:
[0066] an information acquisition module 310, configured to acquire the chromaticity information of the image of the candidate weeding area;
[0067] a histogram generation module 320, configured to generate a target chromaticity histogram of the candidate weeding area image according to the chromaticity information, and obtain peak information and chromaticity range information of the target chromaticity histogram;
[0068] The obstacle determination module 330 is configured to determine whether there is an obstacle in the image of the candidat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More