

Camera and laser radar synchronous control system and method and storage medium
A laser radar and synchronous control technology, applied in the direction of radio wave measurement systems, instruments, measuring devices, etc., can solve the problem that the laser radar and the camera cannot be synchronized accurately, and achieve the effect of accurate and convenient data, easy processing, and synchronization accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
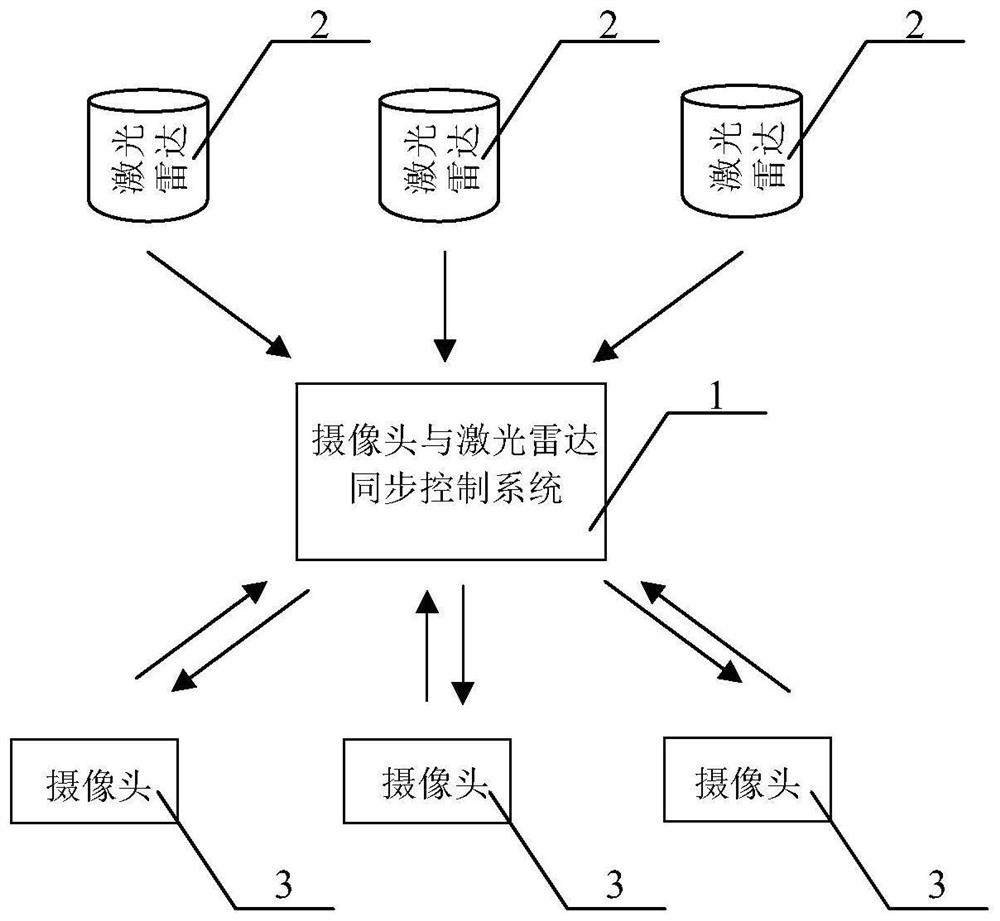
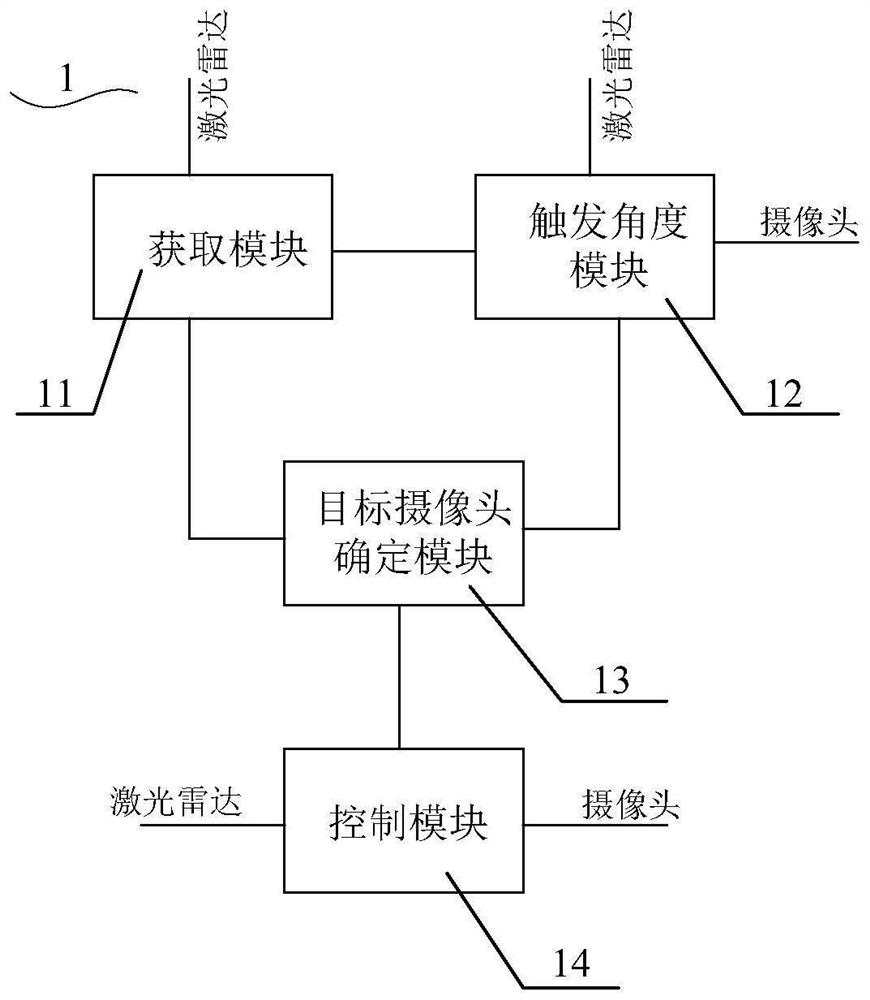
[0048] see figure 1 and figure 2 As shown, in the present embodiment, a camera and lidar synchronization control system 1 is provided, the camera and lidar synchronization control system 1 is connected with the lidar 2 and the camera 3, and the camera and lidar synchronization control system 1 includes:
[0049] The acquisition module 11, which is connected with the laser radar 2, is used to obtain the scanning angle and the timestamp of the scanning angle in the real-time scanning process of the laser radar 2; the triggering angle module 12, the triggering angle module 12 is connected to the acquisition module 11, the lidar 2 and each camera 3, and is used for according to the time stamp, the attribute information of the lidar 2, the scanning angle, the attribute information of each camera 3 and the The joint calibration information of the lidar 2 and each camera 3 is used to determine the trigger angle and trigger timing of each camera 3; the target camera determination mo...
Embodiment 2
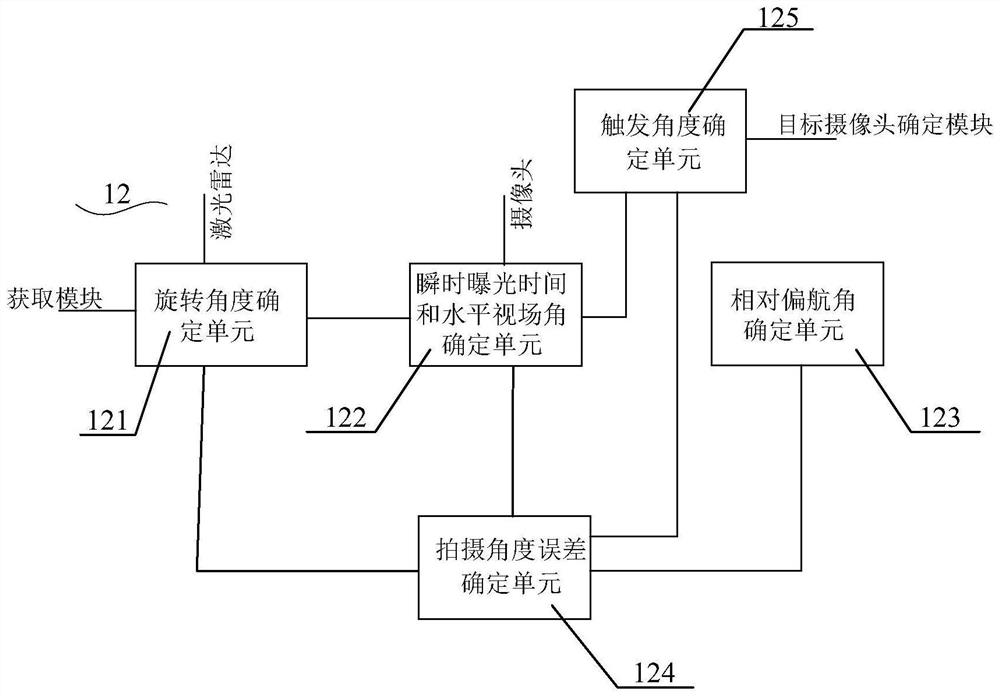
[0053] please continue figure 1 and figure 2 In this embodiment, a camera and lidar synchronous control system 1 is also provided. The camera and lidar synchronous control system 1 includes: an acquisition module 11, a trigger angle module 12, a target camera determination module 13, and a control module 14 , and its connection relationship and function are the same as those in the first embodiment, and will not be repeated here. The main difference between the system proposed in this embodiment and the system in Embodiment 1 is that the trigger angle module 12 further includes several subunits. For details, please refer to the following introduction.
[0054] In this embodiment, a plurality of lidars 2 and a plurality of cameras 3 are used as examples for introduction. Among them, the working states of the plurality of lidars 2 need to be in a synchronized state.
[0055] Specifically, the specific number of the lidar 2 can be set according to actual needs, figure 1 Onl...
Embodiment 3
[0076] please combine Figure 1 to Figure 6 see Figure 7 , this embodiment also provides a camera and lidar synchronization control method, the camera and lidar synchronization control method can be implemented based on the camera and lidar synchronization control system as in Embodiment 1 or Embodiment 2, including:
[0077] S10: Acquire the scanning angle and the timestamp of the scanning angle in the real-time scanning process of the lidar, and obtain the lidar point cloud data when the lidar scans to the scanning angle;
[0078] S20: Determine the trigger angle of each camera according to the timestamp, the attribute information of the lidar, the attribute information of each camera, and the joint calibration information of the lidar and each camera;
[0079] S30: Determine a target camera synchronized with the lidar according to the scanning angle and the triggering angle of each camera;
[0080] S40: When the lidar scans to the trigger angle, the target camera starts ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More