

Redundant mechanical arm inverse kinematics method based on analytic numerical value mixing method
An inverse kinematics and manipulator technology, applied in the field of redundant manipulator inverse kinematics based on analytical numerical hybrid method, can solve problems such as difficulty in satisfying manipulator obstacle avoidance, and achieve the effect of improving computational efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0073] An inverse kinematics method of a redundant manipulator based on an analytical numerical hybrid method, comprising:
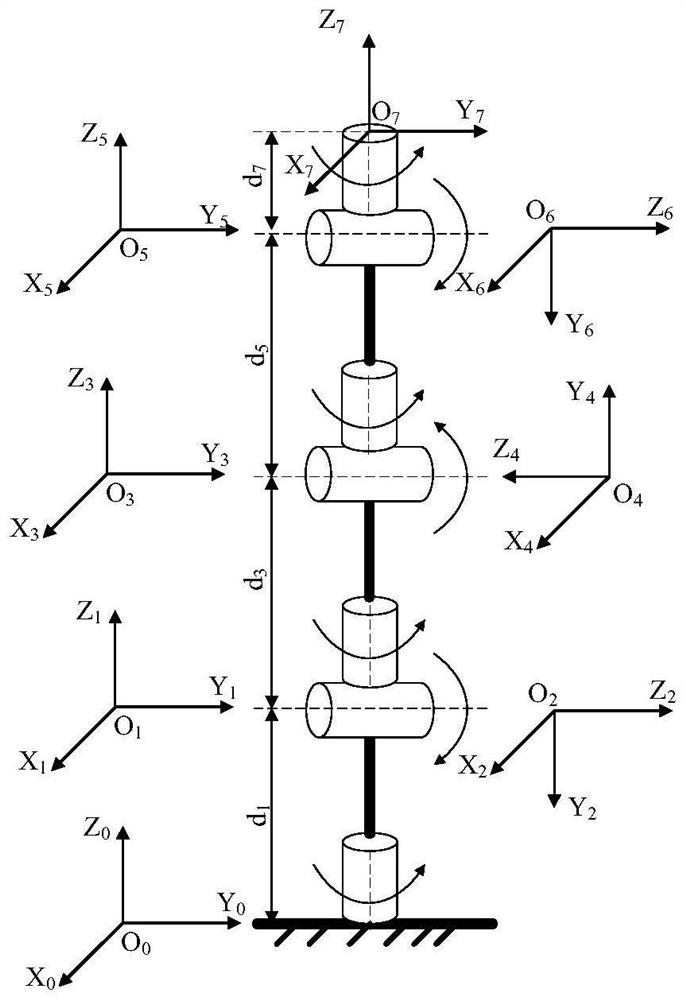
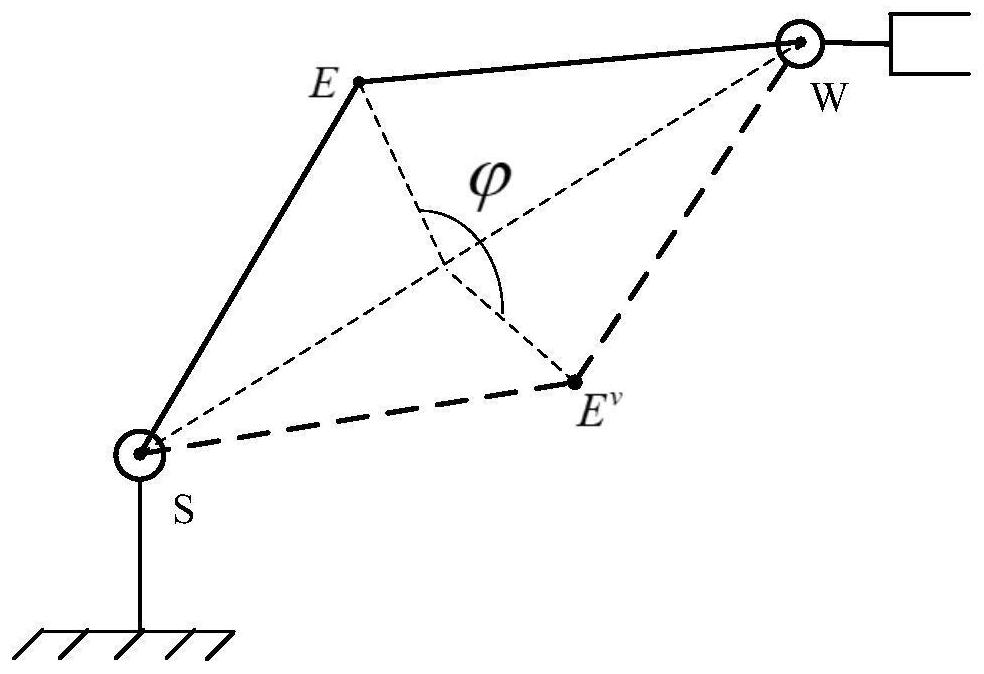
[0074] Step 1: Build the kinematic model of the redundant manipulator to figure 1 For example, the robot arm in the figure 2 The inverse kinematics model of the manipulator is established by the method of parameterizing the angle of the middle arm:
[0075]
[0076]
[0077] in the formula 0 T 7 represents the pose matrix of the end of the manipulator relative to the base, represents the arm angle, Θ=[Θ 1 θ 2 θ 3 θ 4 θ 5 θ 6 θ 7 ] represents the 7 joint angles of the manipulator, each arm angle 8 sets of inverse solutions of the manipulator can be obtained;
[0078] Table 1 D-H parameters of Kuka iiwa seven-degree-of-freedom manipulator
[0079]
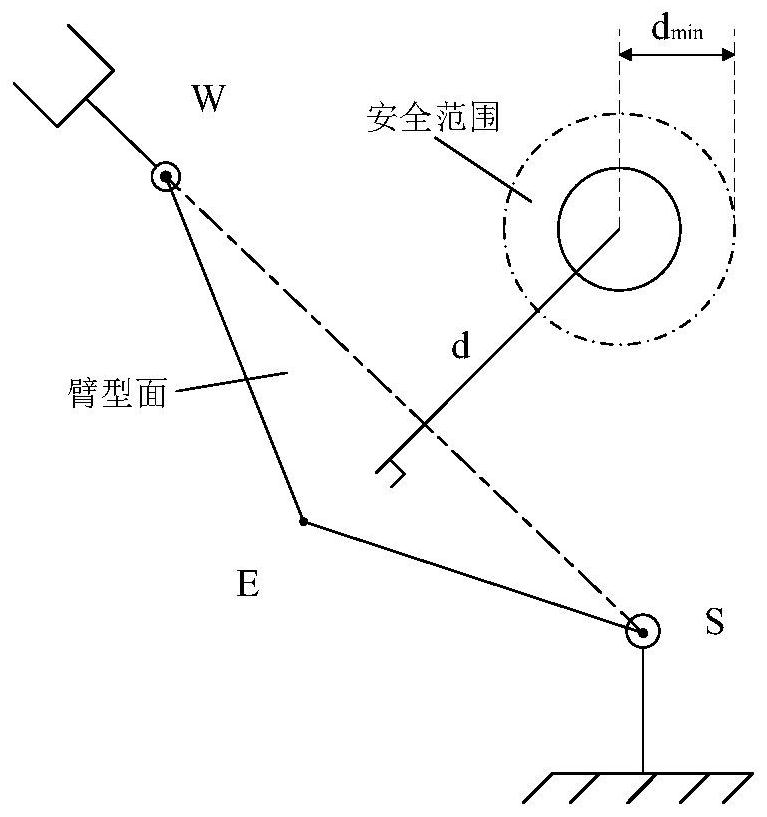
[0080] Step 2: Determine the cost function and constraints for the inverse kinematics problem. Taking obstacle avoidance, singularity avoidance, joint limit avoidance, and motion ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More