Upper limb training mechanism for rehabilitation patient
A technology for training institutions and patients, applied in passive exercise equipment, physical therapy and other directions, it can solve the problems of wrist injury, loss of equipment, heavy equipment, etc., and achieve the effect of avoiding bump damage and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
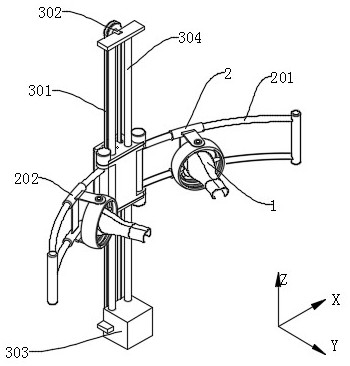
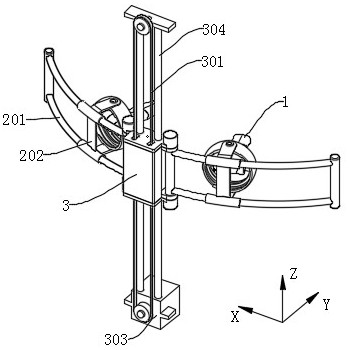
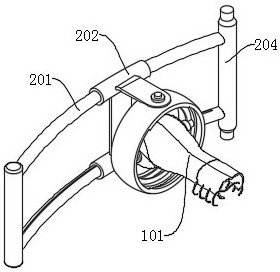
[0028] see Figure 1-Figure 9 , the present invention provides a technical solution: an upper limb training mechanism for rehabilitation patients, comprising a holding part 1, a lateral adjustment part 2 and a vertical lifting part 3;
[0029] The vertical lifting part 3 includes a slider body 305 that can slide vertically up and down, a torque sensor 302 for detecting that the slider body 305 receives an external lifting force, and d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More