

Grinding control method, grinding control device and floor grinding robot
A control method and technology of a control device are applied in the directions of grinding automatic control device, grinding drive device, and parts of grinding machine tools, etc., which can solve problems such as poor floor grinding flatness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
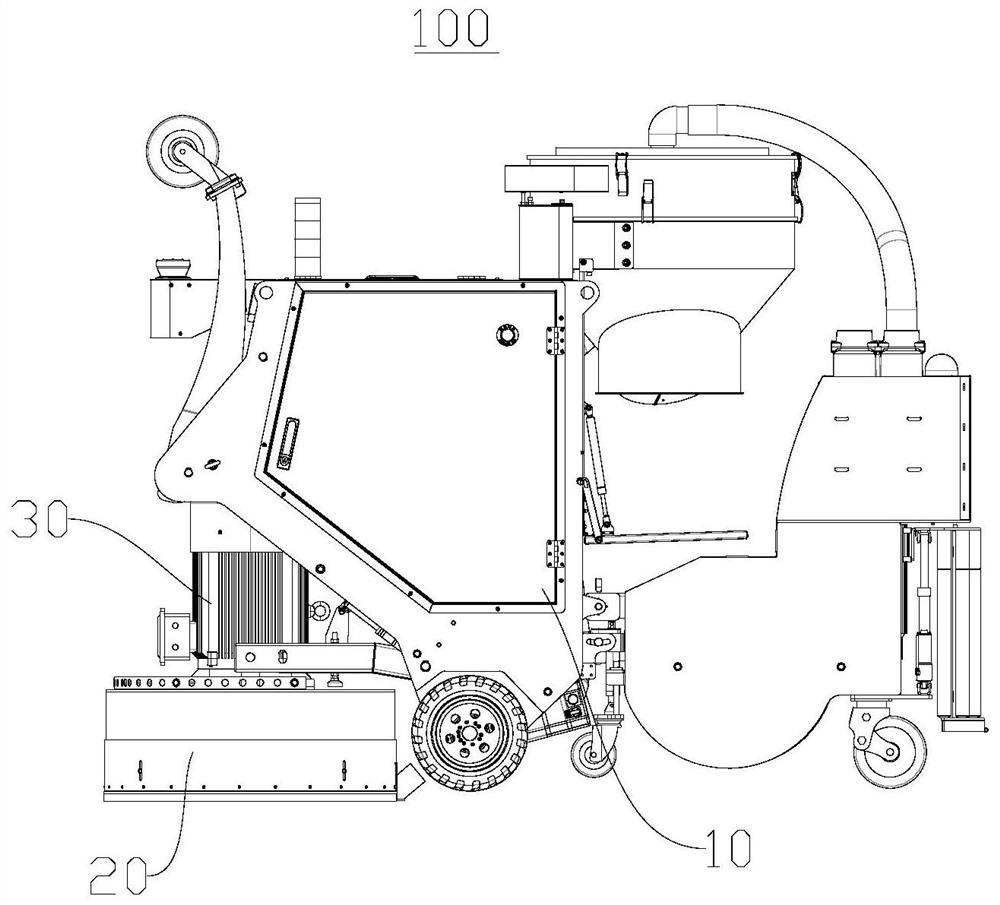
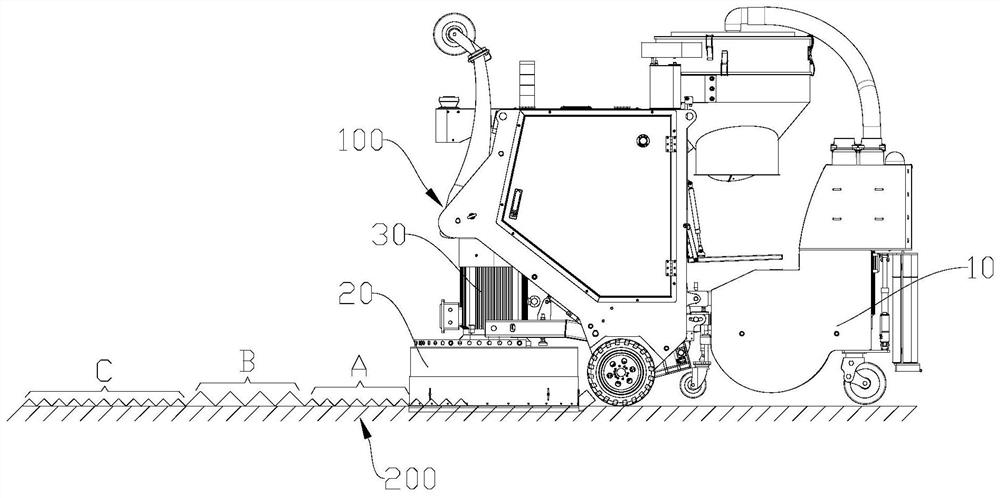
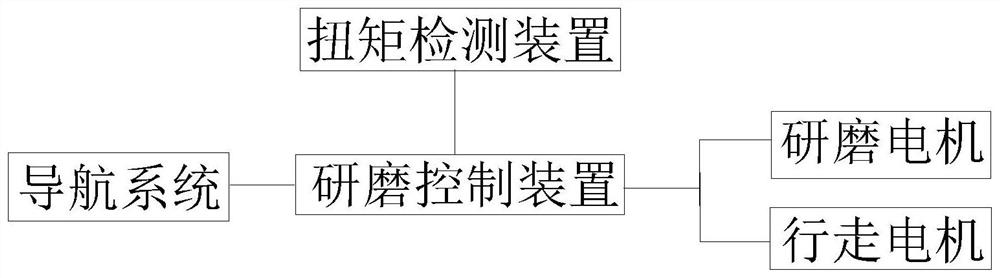
[0036] like figure 1 , figure 2 As shown, the embodiment of the present application provides a floor grinding robot 100 . The floor grinding robot 100 includes a traveling motor 10 , a grinding disc 20 , a grinding motor 30 and a grinding control device. The walking motor 10 is used to drive the floor grinding robot 100 to walk, and the grinding motor 30 is used to drive the grinding disc 20 to rotate.
[0037] In this embodiment, the grinding disc 20 is directly connected to the output end of the grinding motor 30 . In some embodiments, the grinding motor 30 may also be connected to the grinding disc 20 through a transmission mechanism such as a worm gear.
[0038] In this embodiment, the floor grinding robot 100 is further provided with a navigation system, and the navigation system plans a route for the floor grinding robot 100, so that the floor grinding robot 100 drives the grinding disc 20 to grind different positions on the ground 200, which can realize autonomous I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More