Stability analysis method for power grid load frequency control system based on switching time lag
A system stability and power grid load technology, applied in the direction of electrical digital data processing, data processing applications, instruments, etc., can solve the problems of unable to achieve stable control of power grid load frequency, unable to deal with unpredictable and random time delays, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
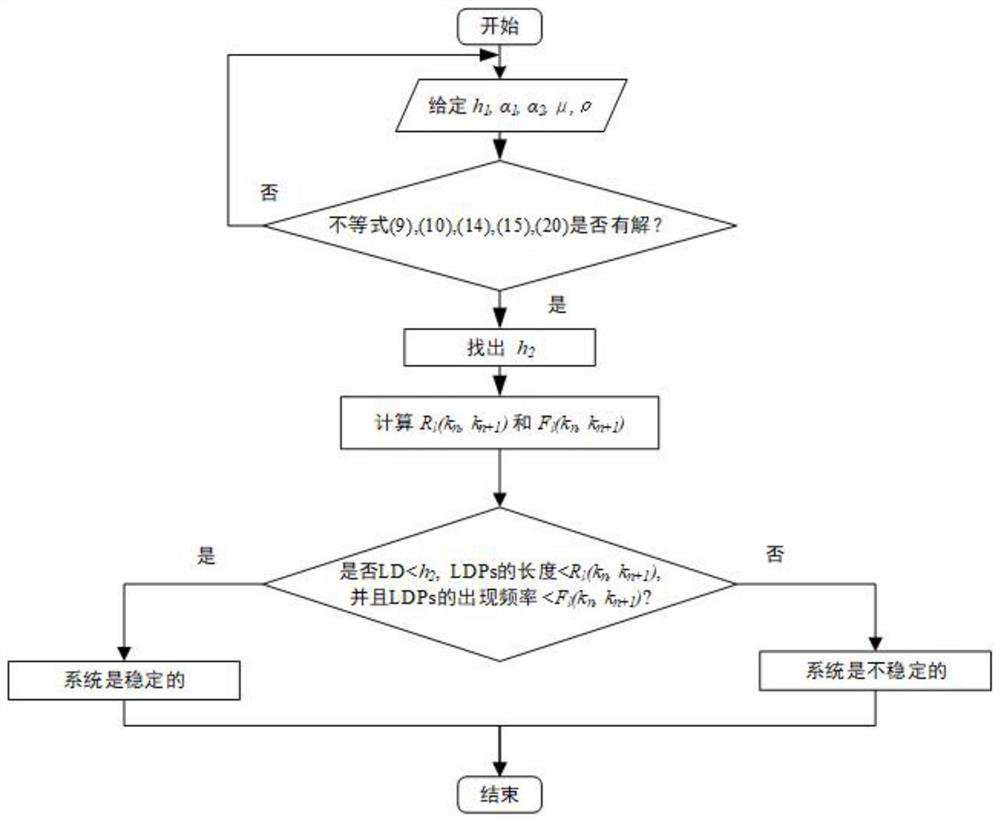
[0203] For the grid load frequency control system model, in this embodiment, take T ch =0.3, T g =0.1, R=0.05, D=1.0, β=21, M=10, then let K p =0.4, K i =0.6, h 1 =1.0, μ=0.1, α 1 =0.2, α 2 =0.6, ρ=2, α′=0.13, α=0.12, from the stability analysis method proposed in the present invention, namely Theorem 3, it can be known that h 2 ≤3.0097, R l (k n ,k n+1 )≤0.0875, F l (k n ,k n+1 )≤0.0316, which means that the system may be stable when the maximum delay does not exceed 3.0097, assuming k n+1 -k n ≤100, in this case, when LDP occurs no more than 3 times and its total length does not exceed 8.75 seconds per 100 seconds, then the system is stable.
[0204] Finally, the validity of the above results is verified by simulation experiments. Let ΔP d Randomly fluctuates in the range of 0.19-0.21p.u. by image 3 It can be seen that the system is stable in SDPs and unstable in LDPs, and by choosing Figure 4 The switching signal in , so that the number of LDP occurrences...
Embodiment 2
[0206] For the grid load frequency control system model, in this embodiment, take T ch =0.3, T g =0.1, R=0.05, D=1.0, β=21, M=10, then let K p =0.3, K i =0.4, h 1 =1.0, μ=0.1, α 1 =0.3, α 2 =0.7, ρ=2.5, α′=0.26, α=0.25, from the stability analysis method proposed in the present invention, namely Theorem 3, it can be known that h 2 ≤4.3114, R l (k n ,k n+1 )≤0.0400, F l (k n ,k n+1 )≤0.0407, which means that the system may be stable when the maximum delay does not exceed 4.3114, assuming k n+1 -k n ≤100, in this case, when LDP occurs no more than 4 times and its total length does not exceed 4.07 seconds per 100 seconds, then the system is stable.
[0207] Finally, the validity of the above results is verified by simulation experiments. Let ΔP d Randomly fluctuates in the range of 0.19-0.21p.u. by Figure 5 It can be seen that the system is stable in SDPs and unstable in LDPs, and by choosing Image 6 The switching signal in , so that the number of LDP occurrenc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com