Vehicle speed control method
A technology of vehicle speed and control method, applied in the field of vehicle speed control, can solve the problems of no solution proposed and low vehicle speed control accuracy, so as to improve the control accuracy, accurately control the vehicle speed, and solve the problem of low control accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027] According to an embodiment of the present invention, an embodiment of a vehicle speed control method is provided. It should be noted that the steps shown in the flowchart of the accompanying drawings may be executed in a computer system such as a set of computer-executable instructions, and , although a logical order is shown in the flowcharts, in some cases steps shown or described may be performed in an order different from that herein.
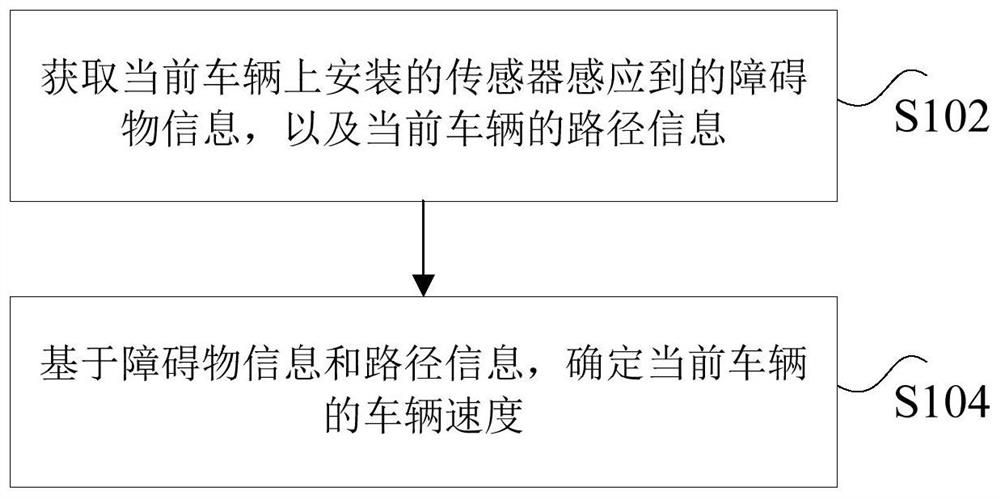
[0028] figure 1 is a schematic flowchart of a method for controlling vehicle speed according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0029] Step S102, obtain obstacle information sensed by a sensor installed on the current vehicle, and path information of the current vehicle, wherein the obstacle information at least includes a first distance between the current vehicle and the obstacle, and the path information includes: the current vehicle and the target posi...
Embodiment 2
[0074] According to another aspect of the embodiments of the present invention, a vehicle speed control device is also provided. The device can execute the vehicle speed control method provided in the above embodiment 1. The specific implementation and preferred application scenarios are the same as those in the above embodiment 1. are the same, and will not be repeated here.
[0075] Figure 4 is a schematic structural diagram of a vehicle speed control device according to an embodiment of the present invention, such as Figure 4 As shown, the device includes: an acquisition module 40 for acquiring obstacle information sensed by a sensor installed on the current vehicle and path information of the current vehicle, wherein the obstacle information at least includes a first distance between the current vehicle and the obstacle , the path information includes: the second distance between the current vehicle and the target position, the path curvature of the road where the curre...
Embodiment 3
[0086] According to another aspect of the embodiments of the present invention, a computer-readable storage medium is also provided, where the computer-readable storage medium includes a stored program, wherein, when the program is run, the device where the computer-readable storage medium is located is controlled to execute the foregoing Embodiment 1 The vehicle speed control method described in .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More