Mechanical arm control strategy and optimization method for microwave far field-near field scanning and imaging task
A near-field scanning and optimization method technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
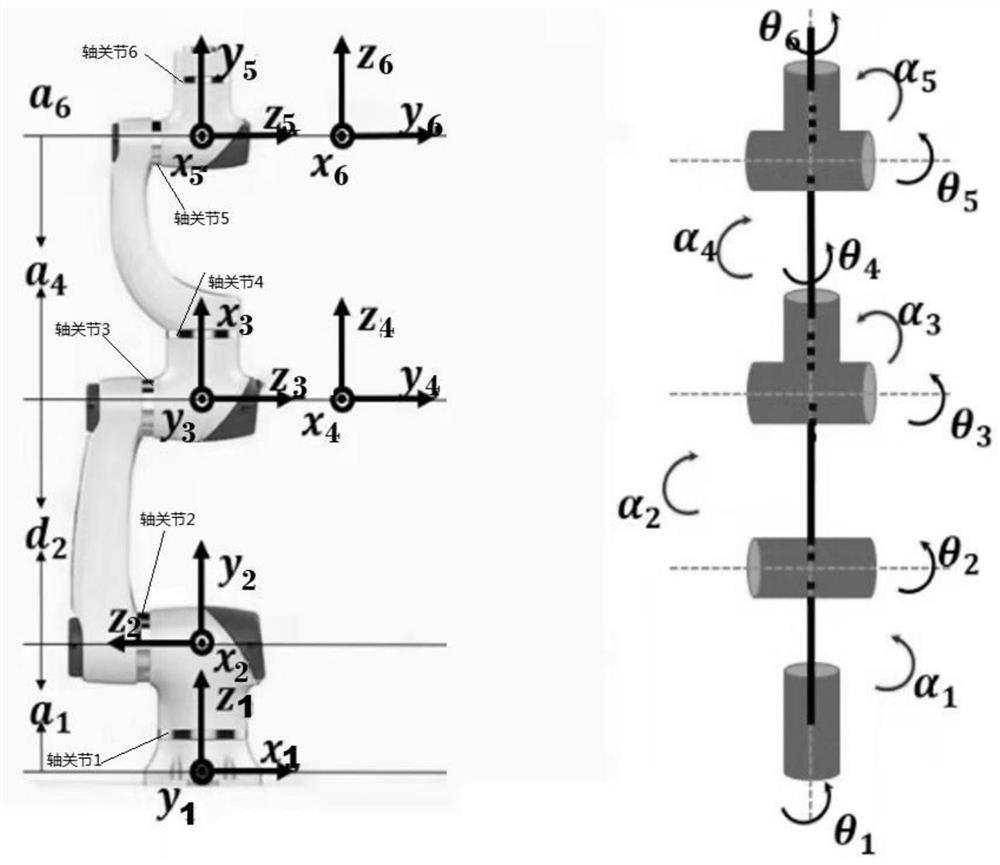
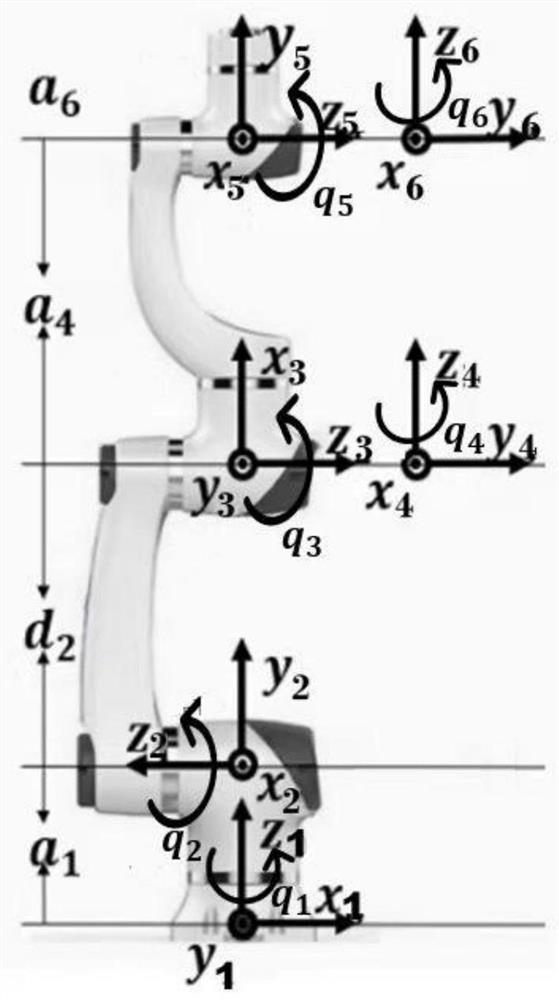
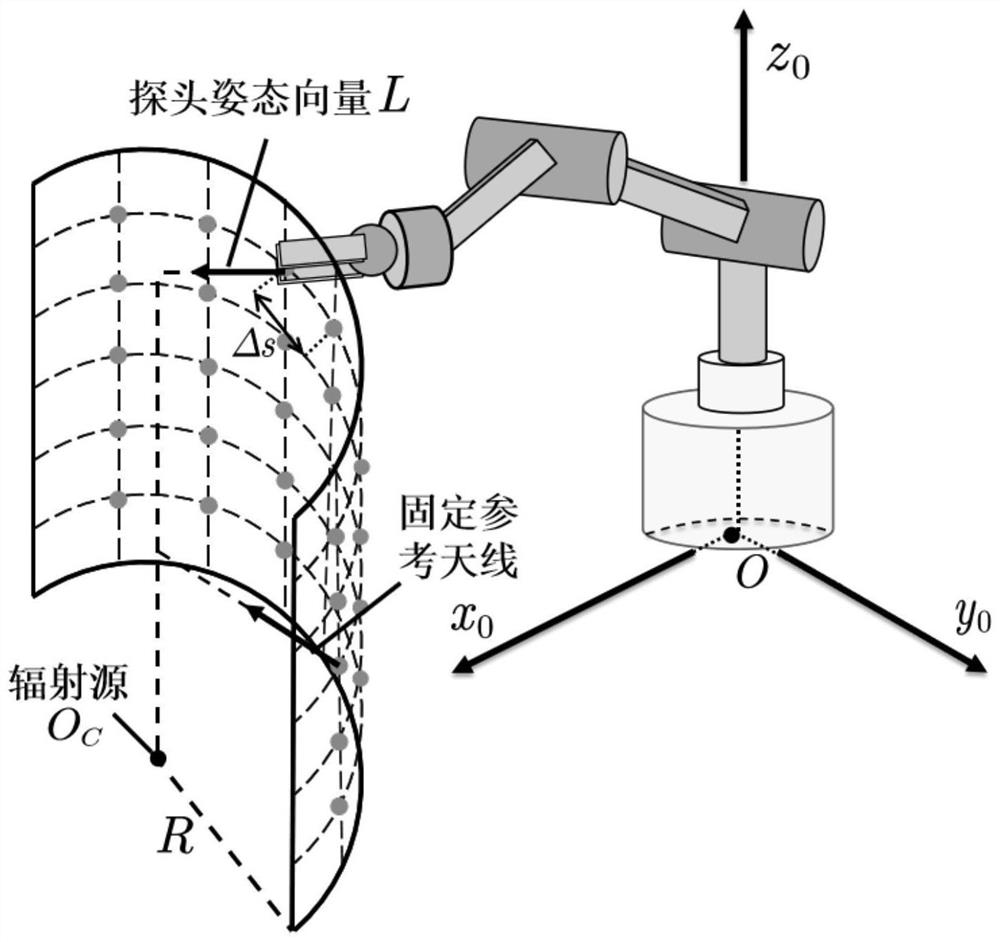
[0037] In this example, the 6-joint manipulator is used as the object, and only the orthogonal and vertical antenna polarization directions are considered, and the control strategy in the near-field imaging task of the cylindrical scanning microwave source is mainly studied. In order to obtain the maximum sampling area of the sampling surface within the reachable working area of the manipulator and the path of the end of the manipulator, the control strategy and optimization method of the manipulator for microwave far-field-near-field scanning and imaging tasks in this embodiment include the following steps:
[0038] (1) According to the limitation of the joint limit angle of the 6-joint manipulator and the limit of the plane sampling plane of the end effector antenna polarization direction, the actual unreachable working area of the manipulator is obtained;
[0039] (2) Then, according to the absence of intersection between the end sampling points on the spatial sampling...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com