Litchi visual picking robot based on laser radar navigation and implementation method thereof
A picking robot and laser radar technology, applied in the field of agricultural machinery, can solve the problems of economic loss, short ripening period of lychees, low picking efficiency, etc., and achieve the effect of ensuring integrity, realizing processability, and expanding the receptive field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
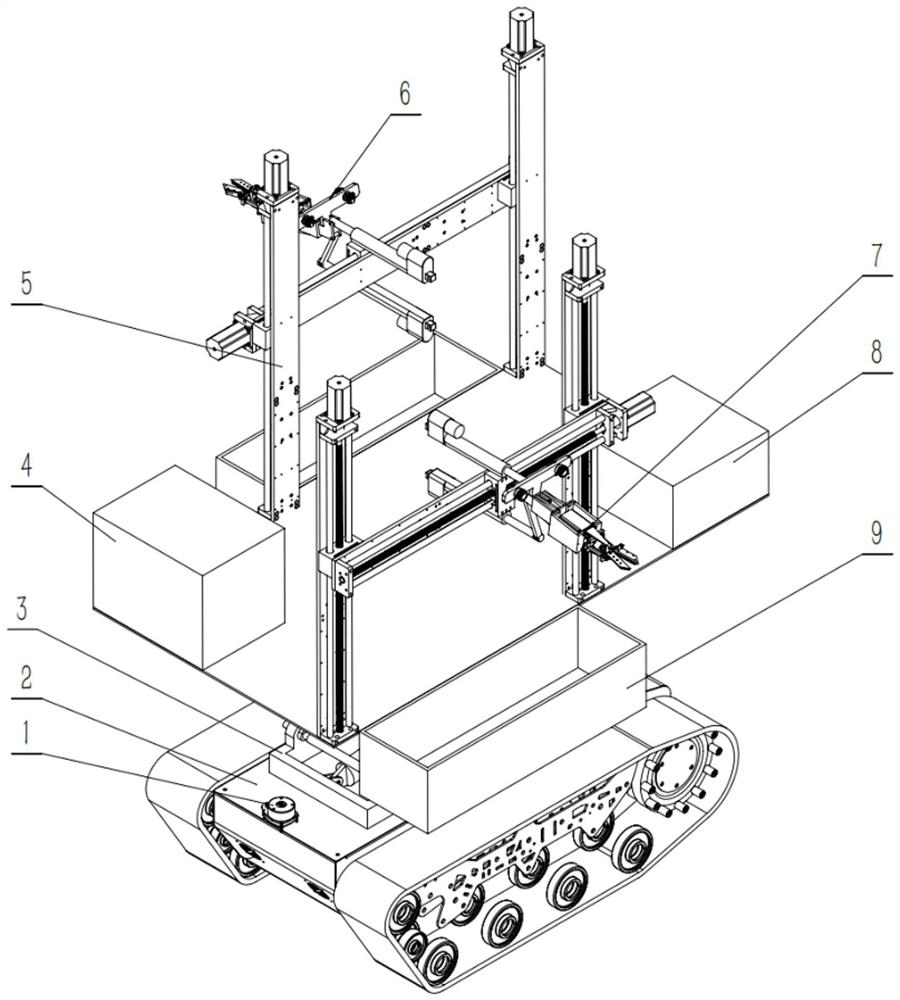
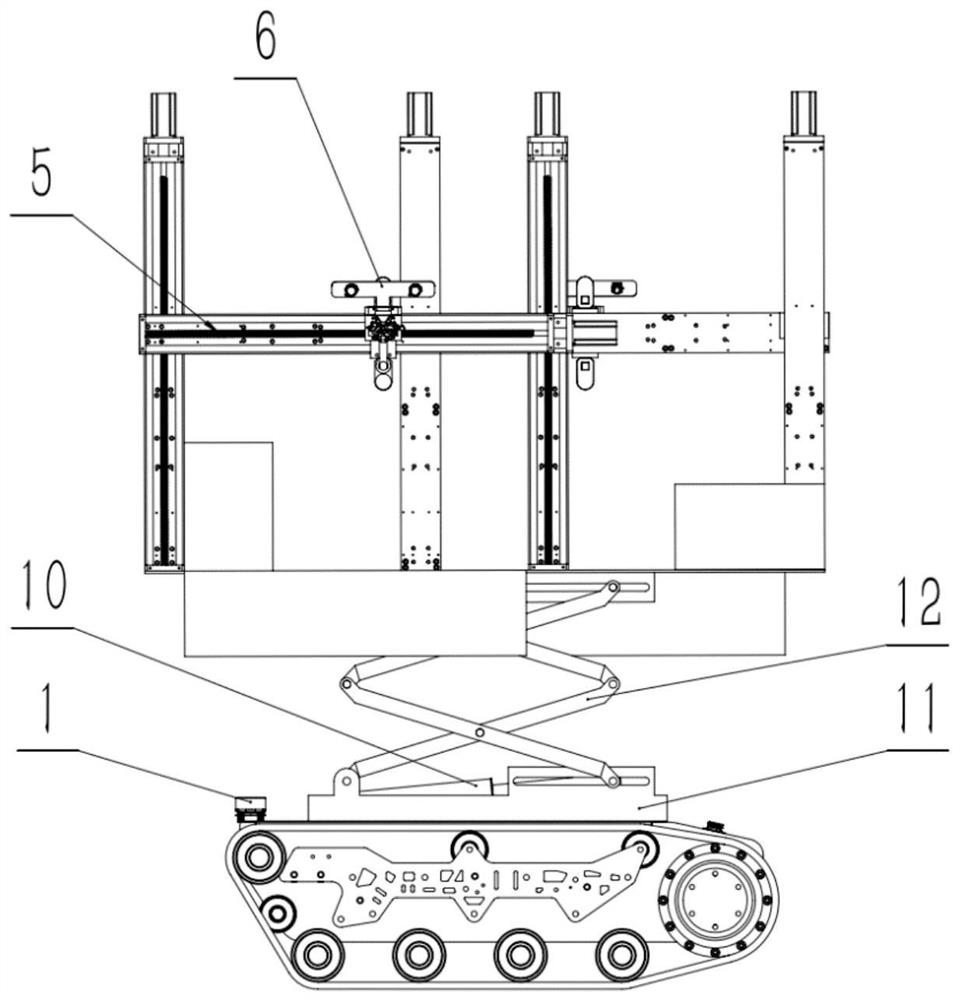
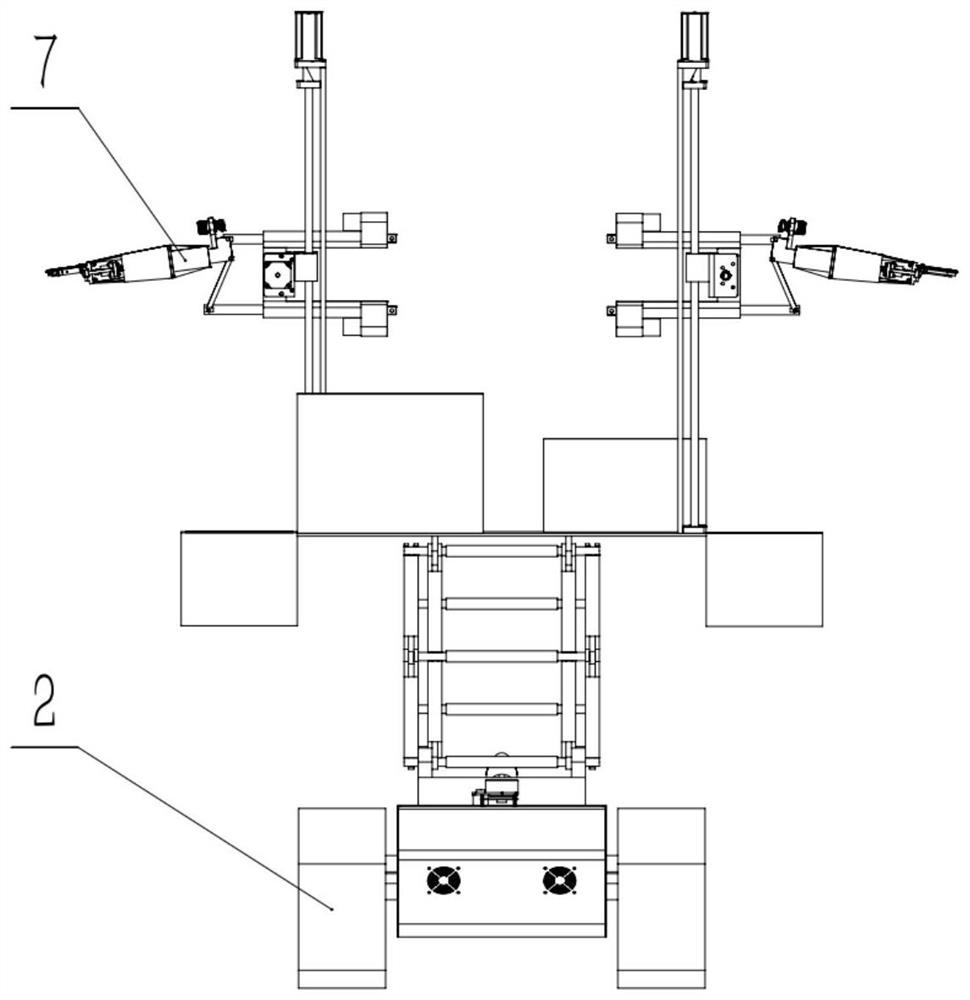
[0042] like Figure 1 to Figure 4 As shown, a litchi automatic picking robot based on lidar navigation includes a navigation mechanism 1, a lifting mechanism 3, a binocular vision mechanism 6, a carrying mechanism 2, a mechanical arm 5, an end effector 7, a power supply 4, a control cabinet 8, Fruit collection device 9; Lidar used for navigation is installed on the front end of the vehicle body bottom plate of the carrier mechanism 2; Lifting mechanism 3 is installed on the vehicle body bottom plate of the carrier mechanism 2; The binocular vision mechanism 6 is installed on the end effector fixing member 34; the end effector 7 is installed at the end of the robotic arm; the fruit collection device 9 is installed on the side of the lifting platform. like figure 1 As shown, the lidar is installed at the front end of the vehicle body of the carrier mechanism, the lidar and the encoder are responsible for acquiring road data information, and the carrier mechanism is responsible ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com