

Moving mechanism of robot in pipe with self position changing four caterpillar feet
A walking mechanism and four-track technology, which is applied to tracked vehicles, steering mechanisms, manipulators, etc., can solve problems such as poor contact between the track and the pipe wall of different shapes of pipelines, and achieve the effect of improving flexibility and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
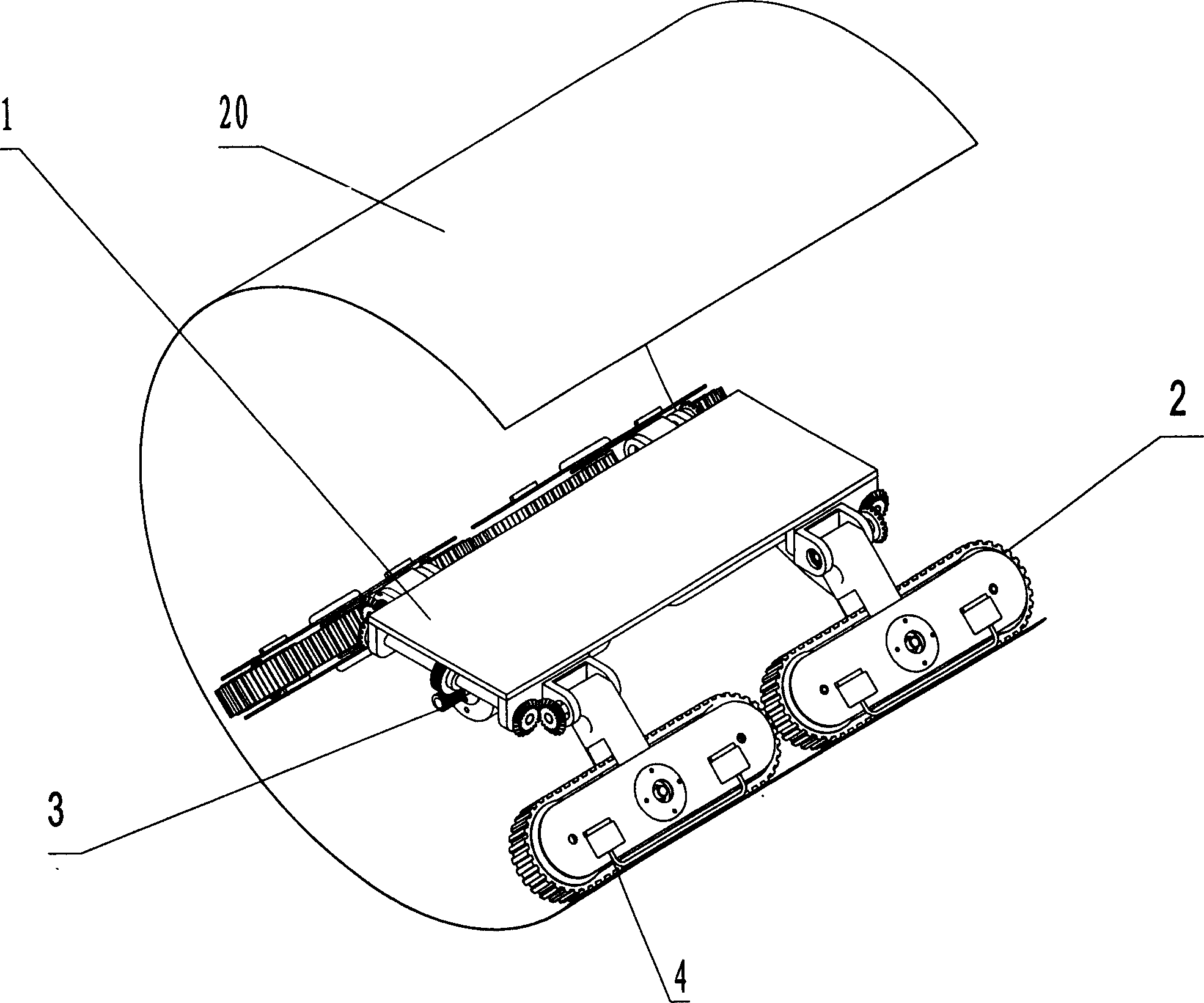
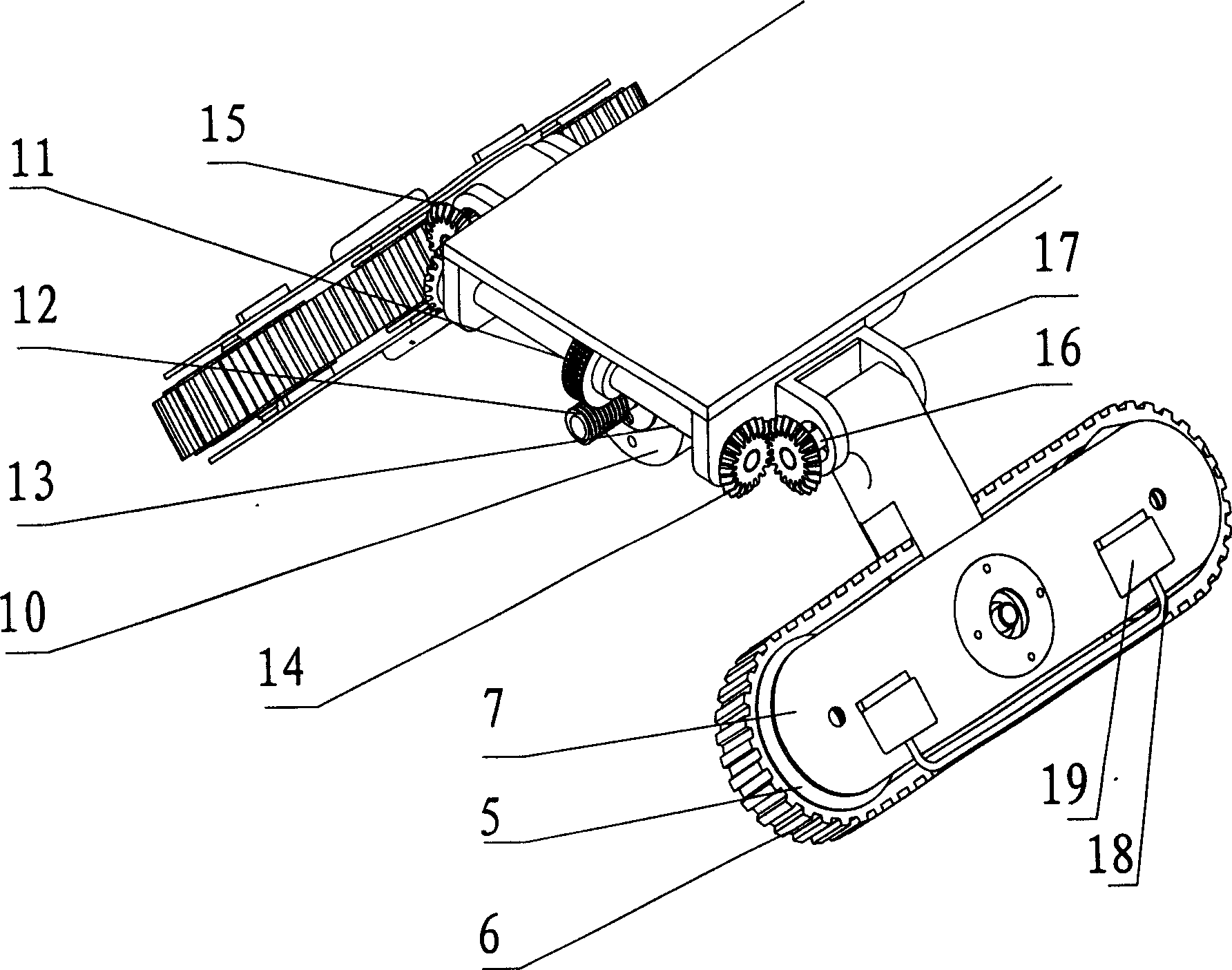
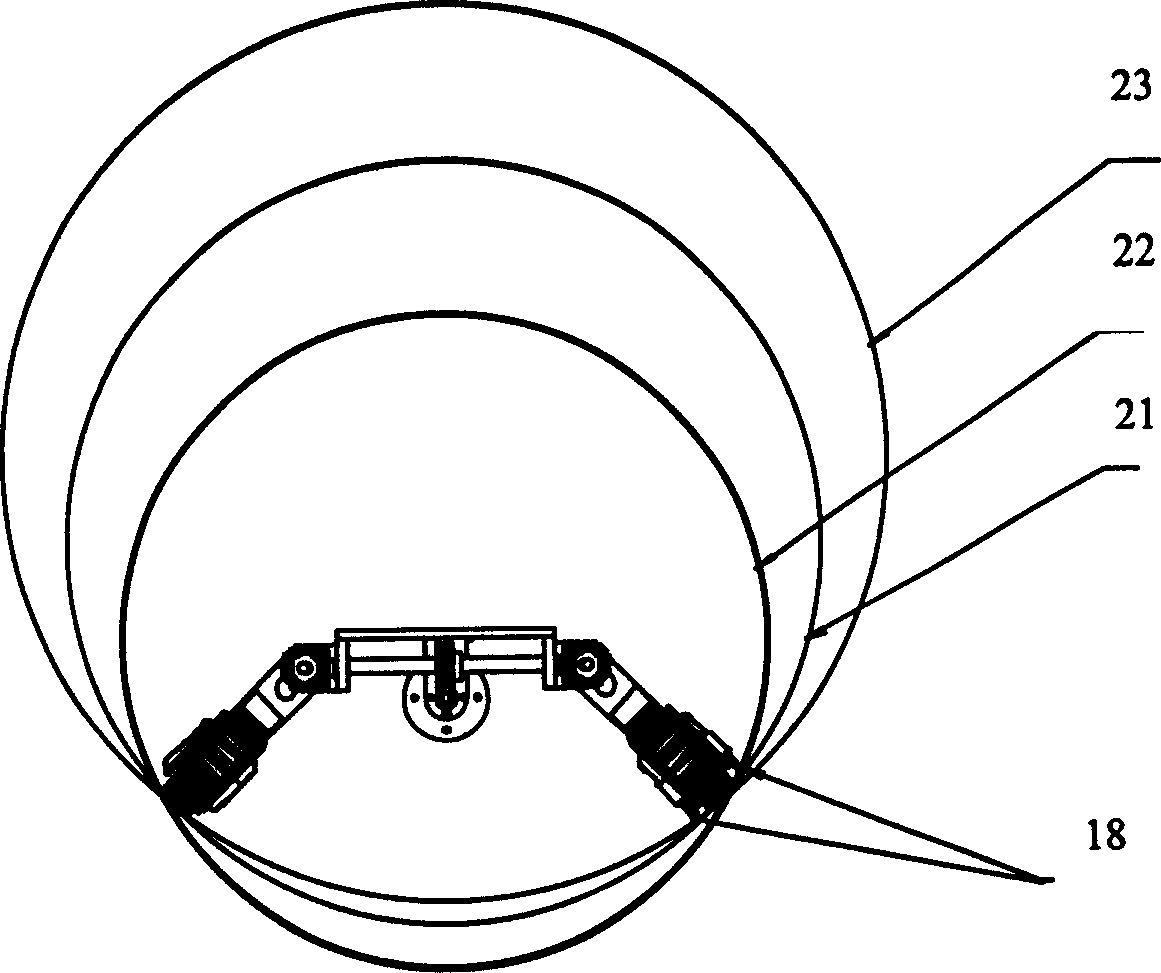
[0015] As shown in the figure, the present invention includes a machine body 1, a crawler foot 2, a lateral swing mechanism 3, and a pipe diameter detection device 4. 8. The swing arm 9 is composed of the track 6 hanging on the track wheel 5 and the track support 7. The track feet 2 are symmetrically arranged along the longitudinal axis of the machine body 1, with a pair at the front and back. The lower end of the swing arm 9 is hinged on the support shaft 8. Each Each crawler foot can swing autonomously around their respective support shafts; there are two sets of said lateral swing mechanism 3, which are respectively arranged at the front and rear ends of the body 1, and each set consists of a traverse motor 10, a turbine 11, a worm screw 12, a transverse shaft 13. Two pairs of meshing bevel gears 14, 15, short swing shaft 16, and swing sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More