

Motion generating method for man-shape link system
A connecting rod and motion technology, applied in the field of motion generation software for computer graphics technology, can solve problems such as no consideration of mechanics, no interactivity, and difficult parameter adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
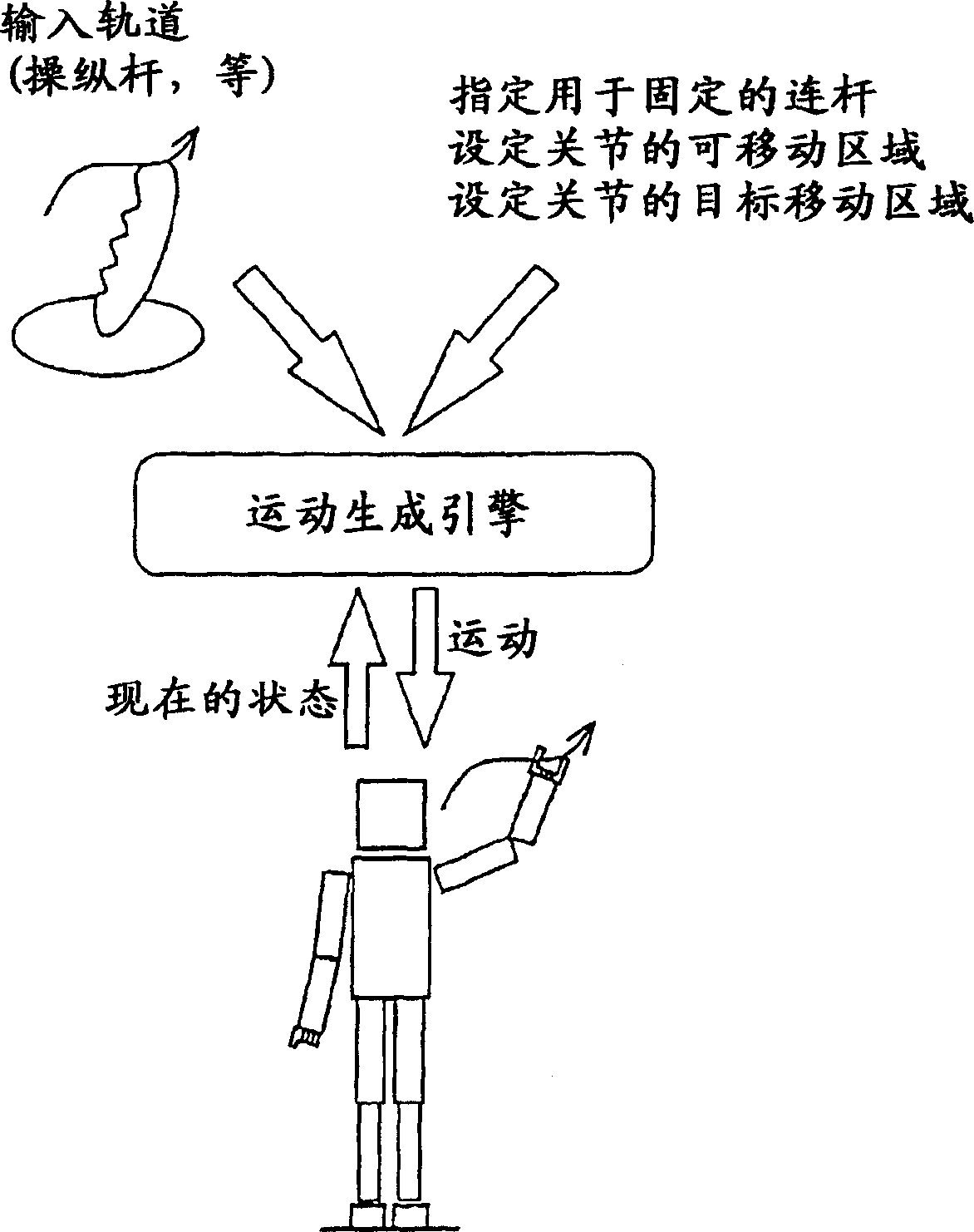
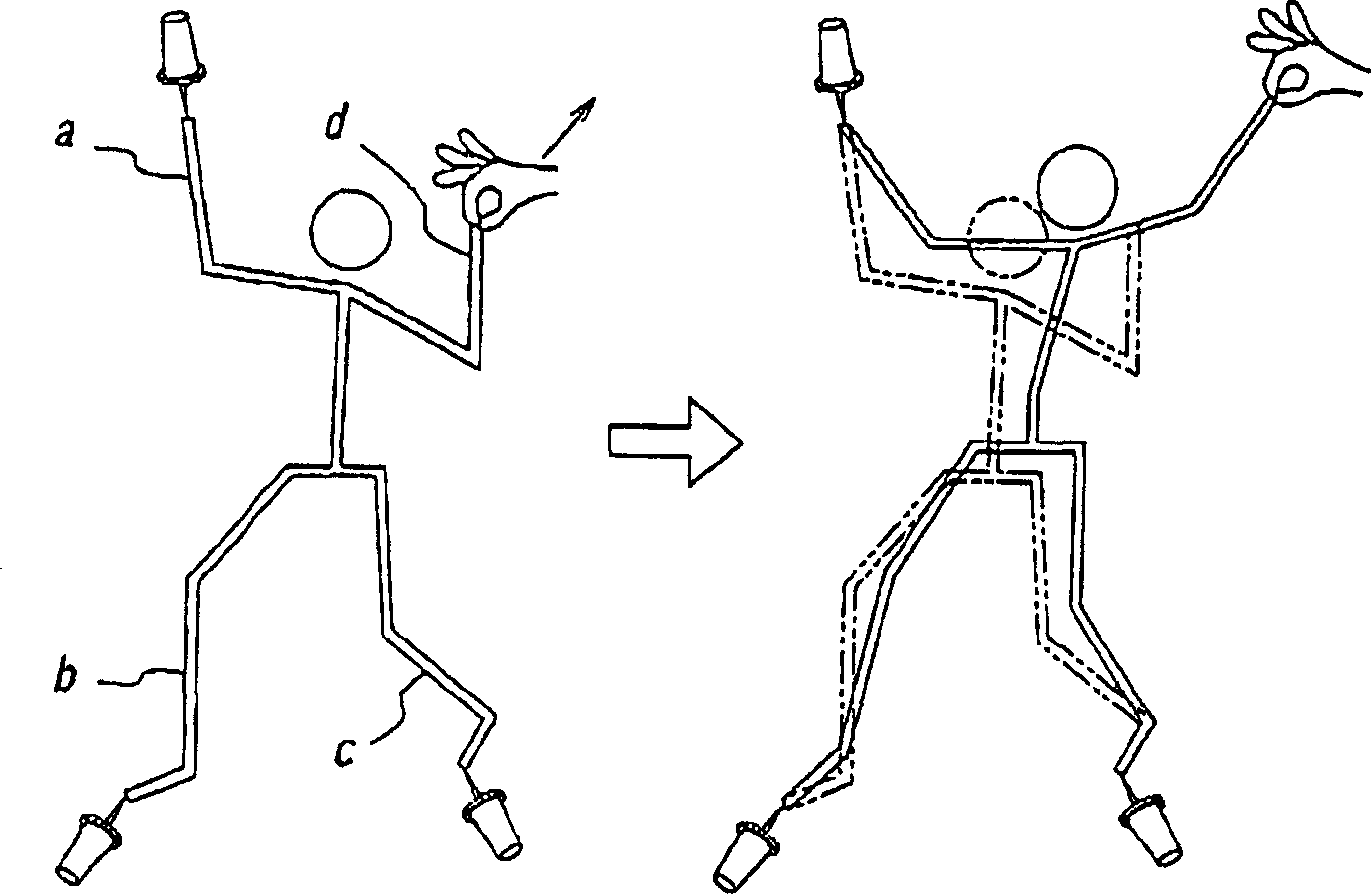
[0028] Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. First, an outline of the above-mentioned related invention "method of generating posture and motion of a wooden linkage system" which is the basis of the interface used in the motion generation method of the humanoid linkage system of the present invention will be shown. In this method, as figure 2 As shown, when several links of the man-shaped linkage system (links a, b, c in the figure) are fixed in space, and the track of another link (d in the figure) is indicated at the same time, Generate a full-body motion that satisfies the constraints of a fixed link and moves on a track. Not only the position of the link can be given, but also the constraint of the movable area of the joint or the target value of the joint can be given. However, in this method, since kinematic constraints are not taken into consideration, mechanically unnatural motion may be gener...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More