

Deformable crawler-type running mechanism
A walking mechanism and crawler-type technology, applied in the field of robot research and engineering, can solve problems such as limited range of motion, single structure, and application restrictions of mobile robots, and achieve the effect of easy processing and manufacturing and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
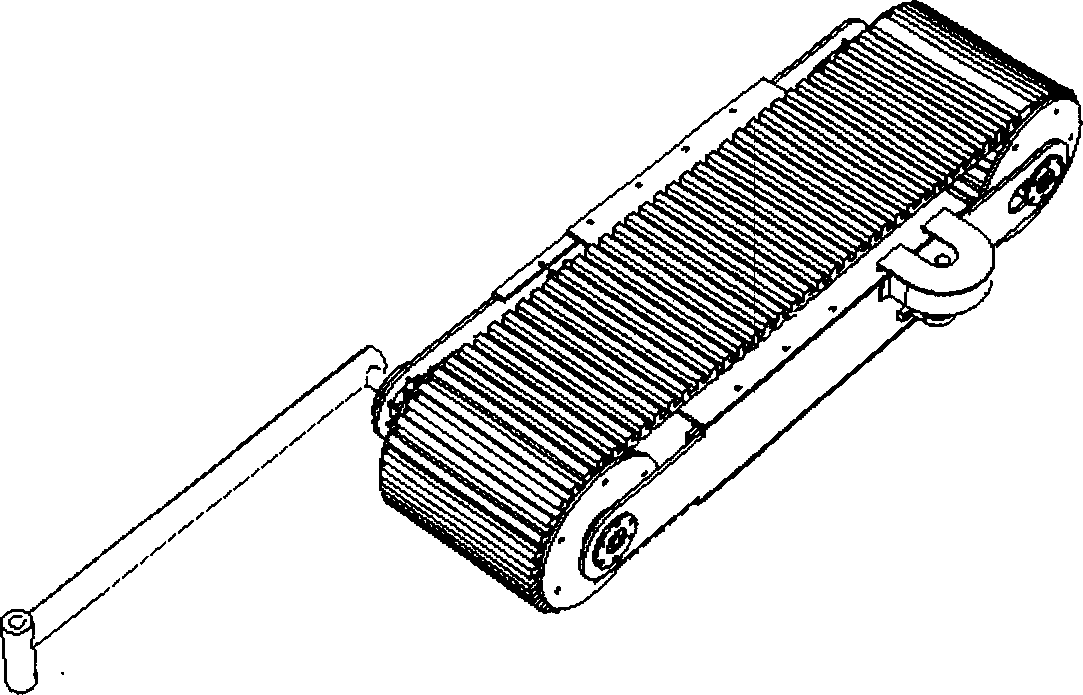
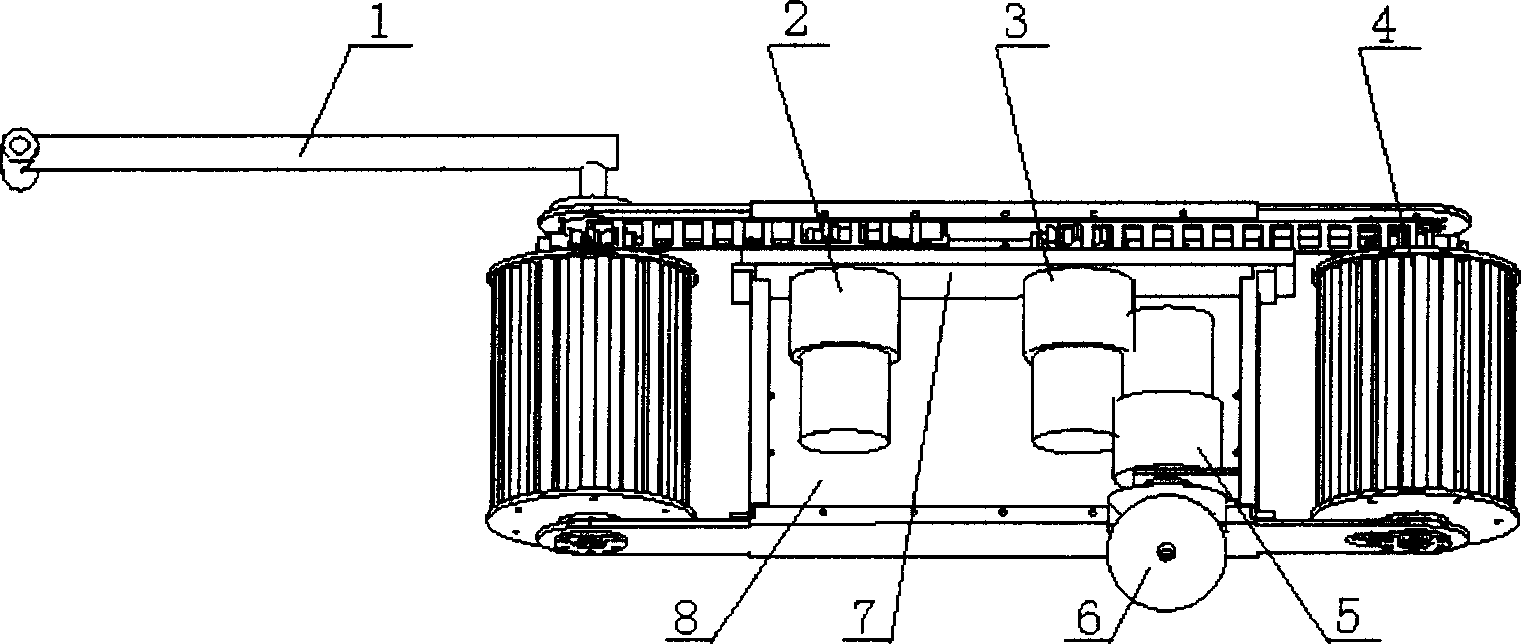
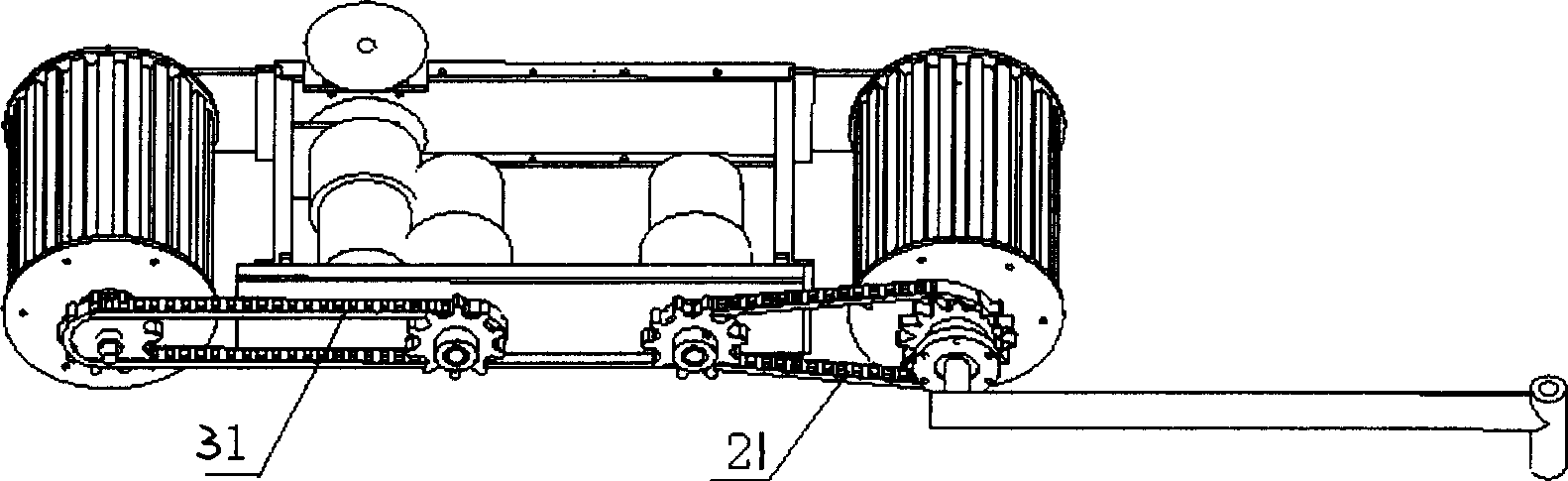
[0018] The appearance of the deformable crawler-type walking mechanism of the present invention is as follows: Picture 1-1 As shown, the internal structure is as Figure 1-2 , 1-3 , 1-4 shown. It consists of three modules, and the modules are connected by connecting arms; each module is composed of connecting arm 1, module pitch motor 2, track drive motor 3, track wheel 4, module deflection motor 5, and deflection bevel gear. The crawler wheels 4 are movably connected with the connecting plate, and the two crawler wheels 4 are arranged at both ends of the housing 8. The housing 8 is provided with a module pitch motor 2, a crawler belt drive motor 3 and a module mounted on the sprocket fixed and adjustable baffle plate 7. The deflection motor 5, the shaft of the module deflection motor 5 is connected with the deflection bevel gear set; one e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More