

Glove capable of feeding back data of touch sensation
A tactile feedback and data glove technology, applied in the computer field, can solve problems such as high price, interference from surrounding magnetic fields and ferromagnetic substances, complex system structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
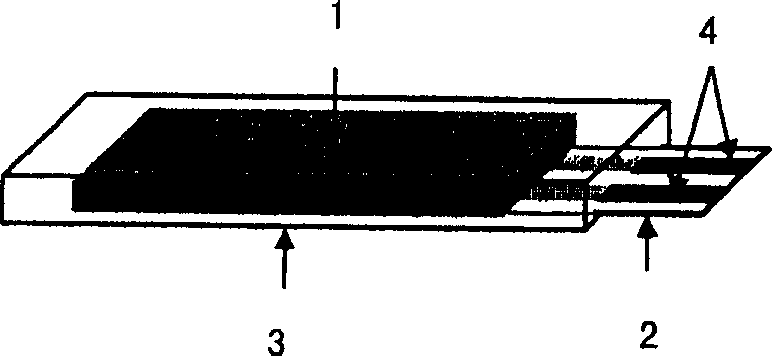
[0028] Bending sensor technology is the core technology of data gloves, which are required to have the characteristics of lightness, good flexibility, and high reliability. What the present invention adopts is the bending sensor based on the principle of force sensitivity. figure 1 Shown is the structural diagram of this sensor. This new bending sensor is mainly composed of the following three parts: force-sensitive material 1, flexible circuit board 2, and elastic packaging material 3. Two parallel copper wires 4 are arranged on the strip-shaped flexible circuit board 2, and the force-sensitive material 1 is used to cover most of the flexible circuit board 2, and then a layer of elastic is coated on the force-sensitive material 1. The packaging material 3 and the flexible circuit board 2 leave either end outside so that the wire 4 can be connected to an external circuit.
[0029] The force-sensitive material 1 is the sensitive element of the sensor, and it is covered on a fl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More