

Internet-based robot long-distance control method
A remote control and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as instability of the control system, uncertain changes in time delay, and difficulty in remote control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
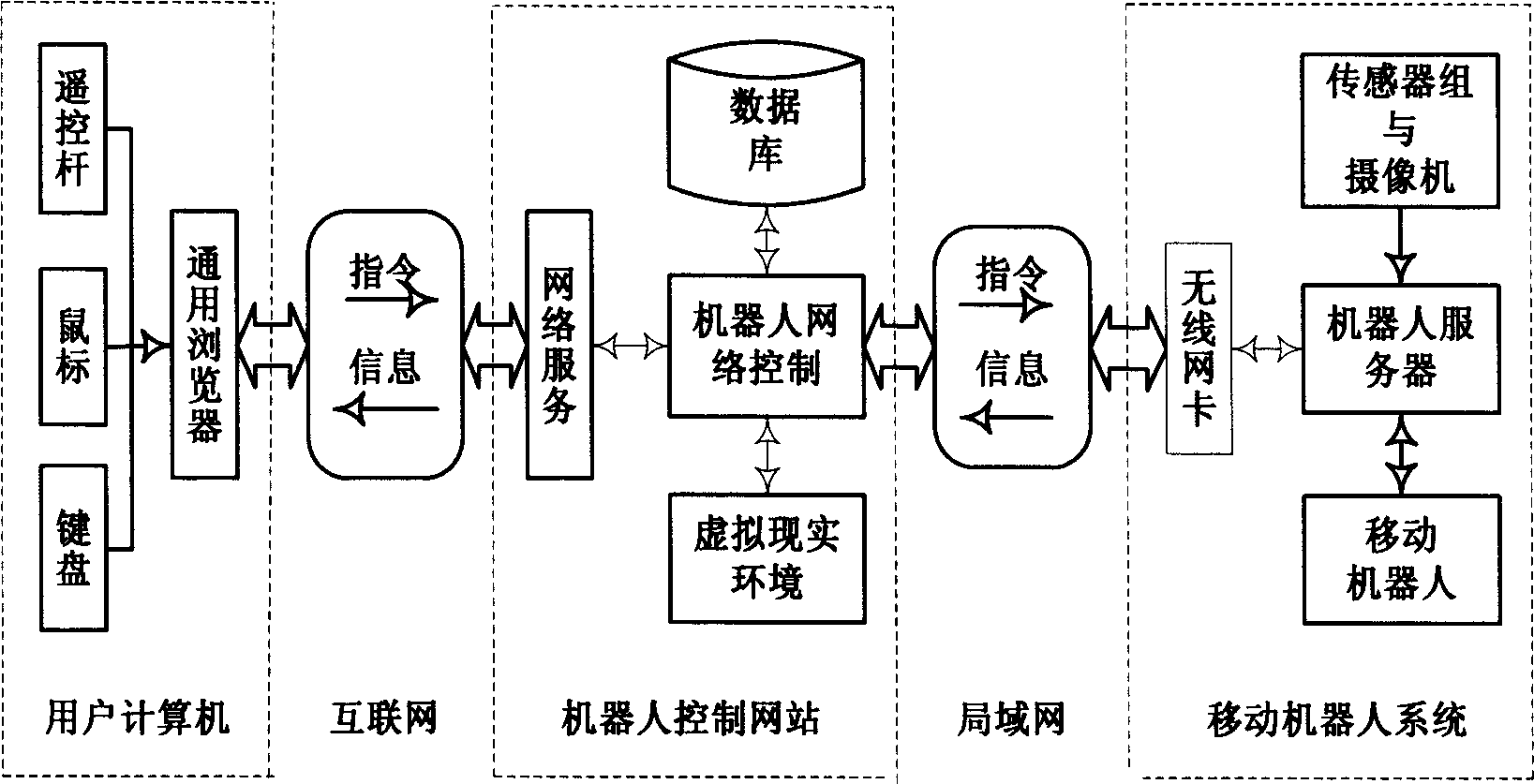
[0012] The Internet-based robot remote control method of the present invention is mainly composed of three parts: a remote user computer, a robot control website and a mobile robot system. The network control part adopts browser / server network structure design. see figure 1 .
[0013] A user computer is any computer connected to the Internet, and the connection method can be any one of dial-up, ADSL and broadband. Users can control the robot by logging in to the machine access website with a common browser. There is no special requirement for the computer used by the remote user, no special client software needs to be installed, and the user does not need to have professional robot knowledge.
[0014] The robot control website is mainly implemented by a network server (one or more servers can be configured according to the amount of information that the system needs to process, and this system can be configured with one server to meet the requirements), which is logically d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More