

Human imitation robot action similarity evaluation based on human body motion track
A technology of human movement and robotics, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as differences, and achieve the effect of simple algorithms and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
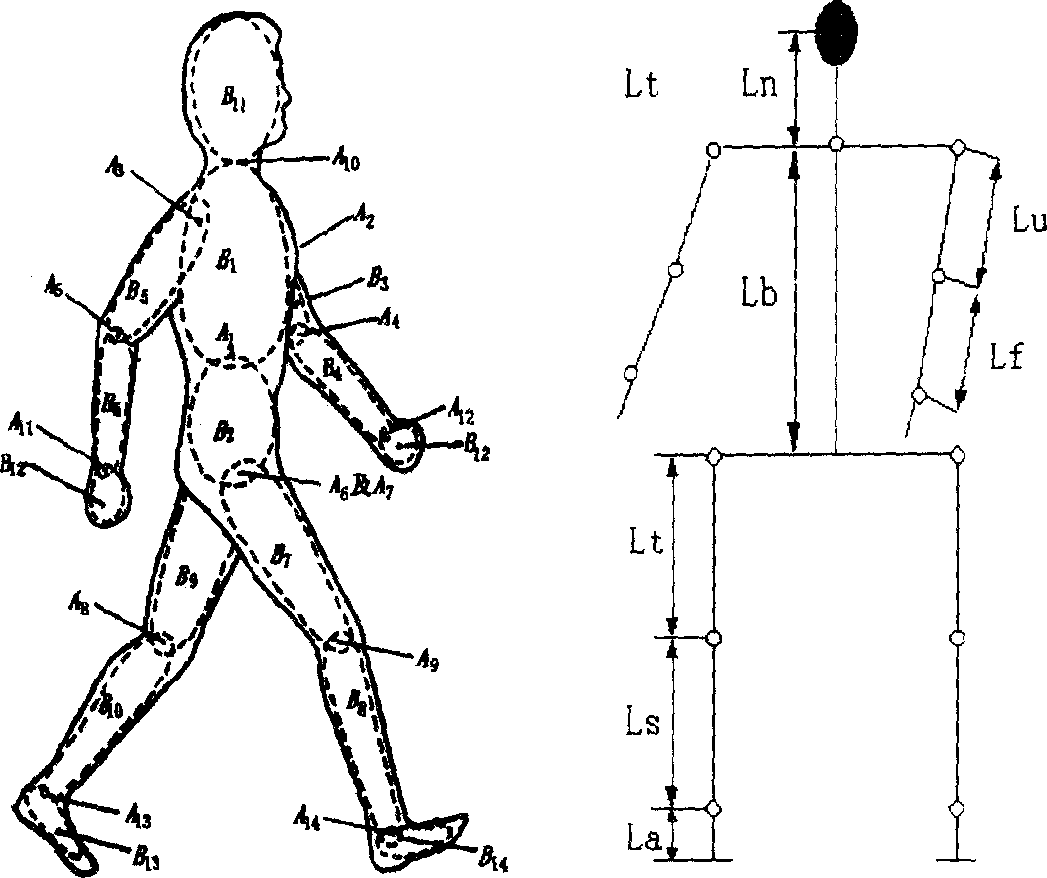
[0021] The contact constraint between the humanoid robot foot and the ground is a key issue for the movement of the humanoid robot. Because the length of the humanoid robot leg is not proportional to the human skeleton, the ground contact constraint is often not satisfied, resulting in slipping, The occurrence of problems such as stepping into the air and falling into the air. Humanoid robots have two support phases in motion: single-leg support and double-leg support. When the humanoid robot is in the process of going from single-leg support to double-leg support, the swinging foot should land on the ground in the planned position and direction. In the case of stepping on the air, the foot is in the air. Conversely, the foot is below the surface of the ground during plunge. In the double-leg support stage, the two feet should be fixed on the ground and there should be no sliding. However, when the obtained human joint angle data is directly applied to the humanoid robot, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More