

Presenting objects in a sonar image of an underwater environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
example sonar
Overview of Example Sonar and Transducer Elements
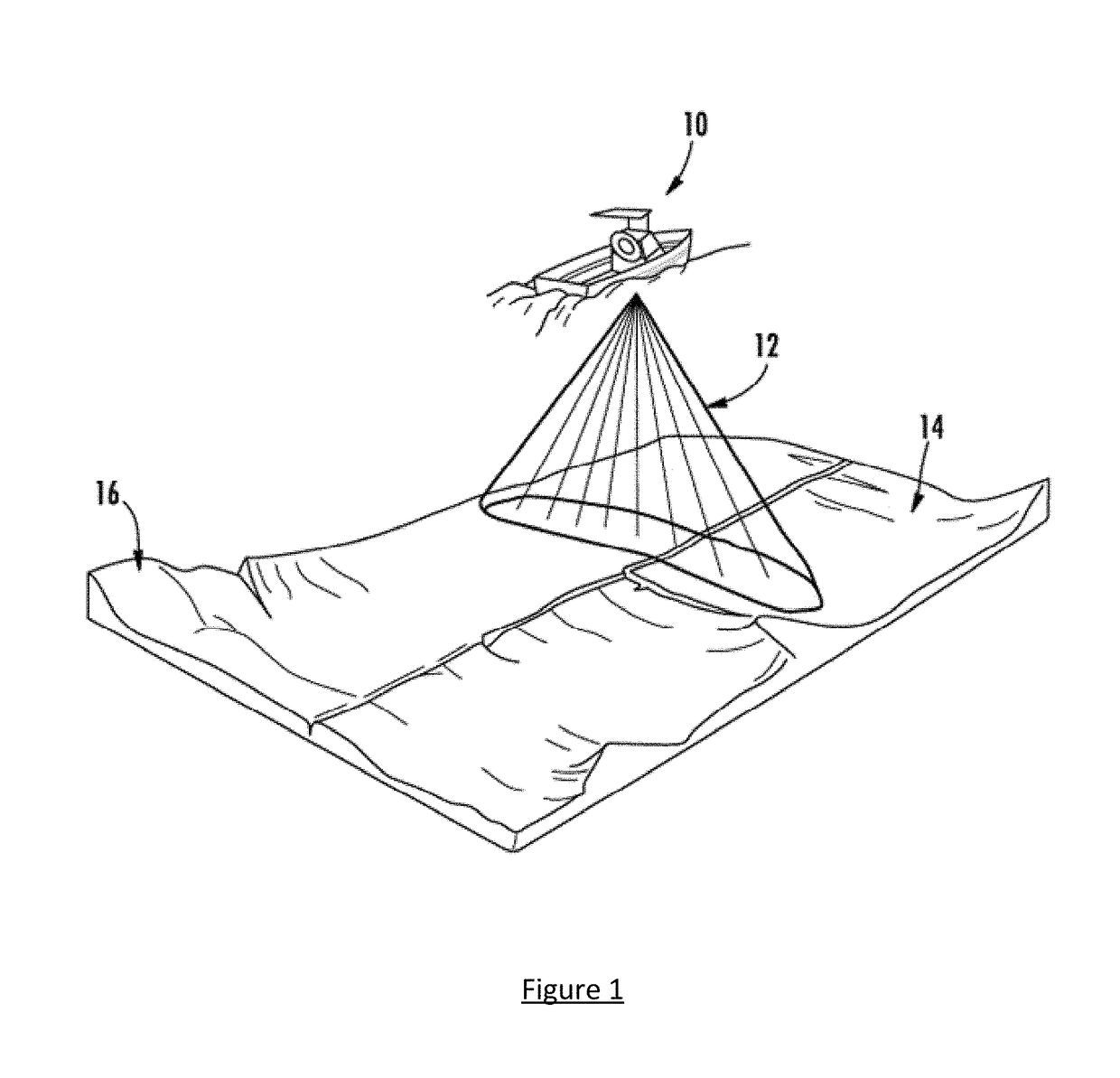
[0045]Sonar systems, such as sonar depth finders, sidescan sonars, downscan sonars, and sonar fish finders, are commonly employed by boaters, sport fishermen, search and rescue personnel, researchers, surveyors, and others. With reference to FIG. 1, a boat 10 may include a sonar system configured to create electrical pulses from a transceiver. A transducer then converts the electrical pulse into sound waves 12, which are sent into the water. In the depicted embodiment, a fan-shaped sound beam (e.g., a beam shape created from one or more linear transducers) is being transmitted into the water, however, as will be apparent to one of ordinary skill in the art in view of this disclosure, other sound beam configurations (e.g., conical shaped, elliptical shaped, multiple conical shaped, etc.) may be transmitted.
[0046]When the sound waves 12 strike anything of differing acoustic impedance (e.g., the sea floor or something suspended in the wa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More