

Groove type reactor non-linear predication control method based on multi-kernel support vector machine
A kernel support vector machine and support vector machine technology, applied in adaptive control, general control system, control/regulation system and other directions, can solve the problems of modeling accuracy dependence, large amount of calculation, poor real-time performance, etc., to avoid online iteration Approximate optimization, simple identification process, and clear physical meaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The purpose and effects of the present invention will become more apparent by referring to the accompanying drawings in detail of the present invention.
[0032] 1. Nonlinear prediction model based on multi-core support vector machine
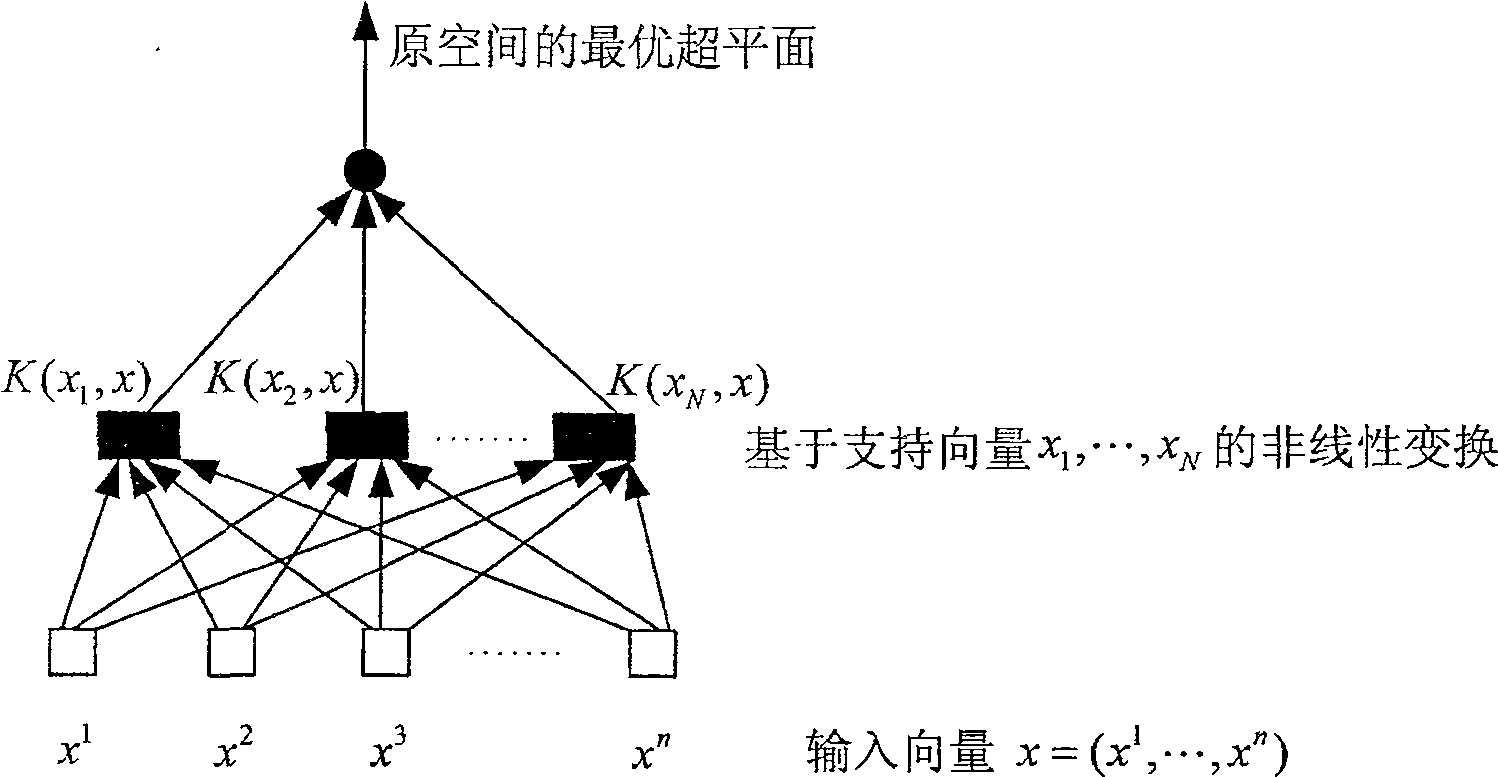
[0033] A support vector machine is a novel learning machine. figure 2 A block diagram of the support vector machine itself is given. The basic idea of the support vector machine is to map the linearly inseparable low-dimensional space data into a linearly separable high-dimensional space through the nonlinear inner product kernel function, and perform linear regression fitting in this high-dimensional space.
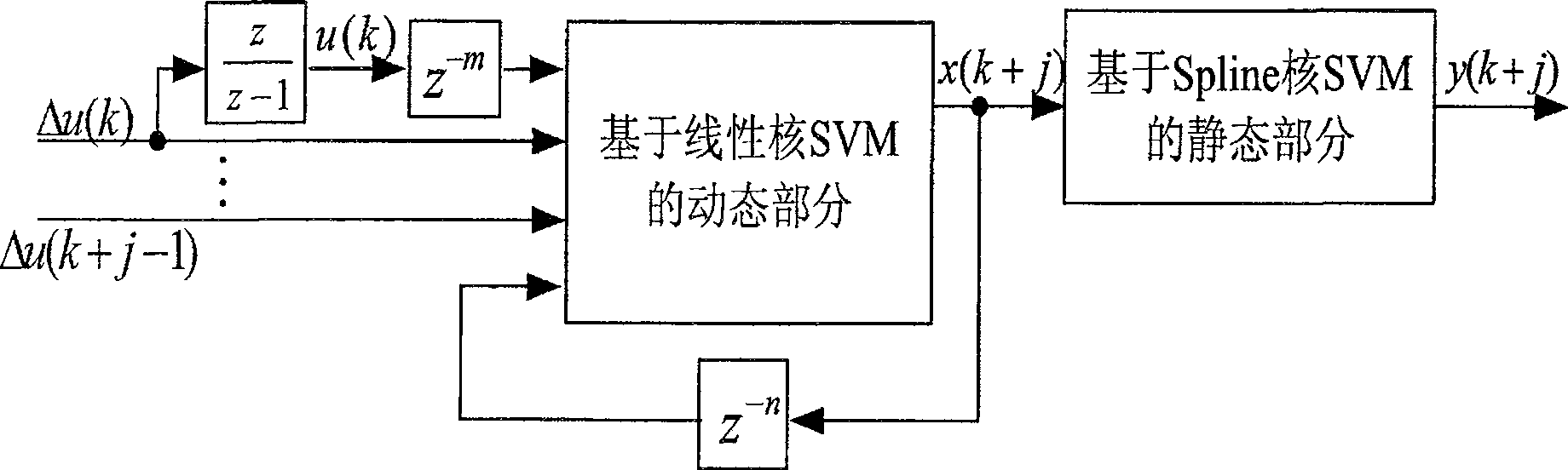
[0034] The nonlinear model structure based on multi-core support vector machine is as follows: image 3 As shown, it includes the concatenation of the dynamic part based on the linear kernel SVM and the static part based on the spline kernel SVM.
[0035] The linear dynamic part is described by
[0036] x(k+j|k)=f[x(k),...,x...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More