

Pilotless plane landing navigation method and its device
A technology of unmanned helicopters and guidance devices, which is applied in the fields of image recognition and navigation communication, can solve the problems that limit unmanned helicopters to land lightly and flexibly, and achieve the effects of reducing computational complexity, low price, and improving operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
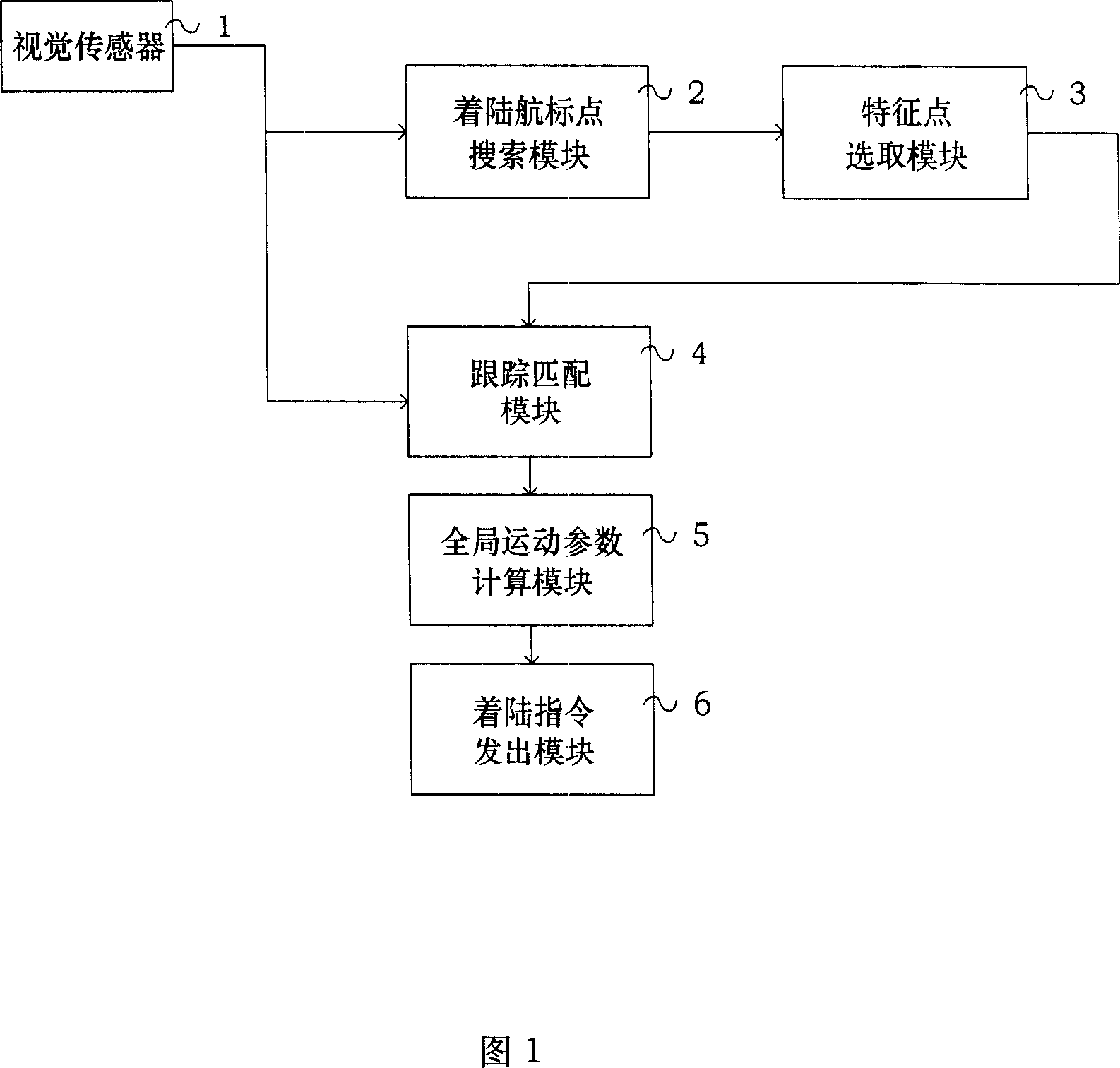
[0026] FIG. 1 is an example of a functional block diagram of an unmanned helicopter landing guidance device according to the present invention.
[0027] As shown in Figure 1, the basic structure of the unmanned helicopter landing guidance device includes: visual sensor 1, landing beacon point search module 2, feature point selection module 3, tracking matching module 4, global motion parameter calculation module 5 and landing command issuing module 6.
[0028] The visual sensor 1 is configured on the unmanned helicopter to obtain ground image information in real time. The landing beacon point module 2 processes the image acquired by the visual sensor 1 to search for the landing beacon point area. If the beacon point is found, it is determined by The feature point selection module 3 selects the feature points, and then the tracking module 4 performs the tracking and matching of the feature points. The global motion parameter calculation module 5 calculates the motion parameters...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More