

Pneumatic flexible torsional knuckle
A flexible and joint technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of unreasonable robot joint structure, difficulty in miniaturization, poor flexibility, etc., and achieve the effect of high implementation value, easy miniaturization, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
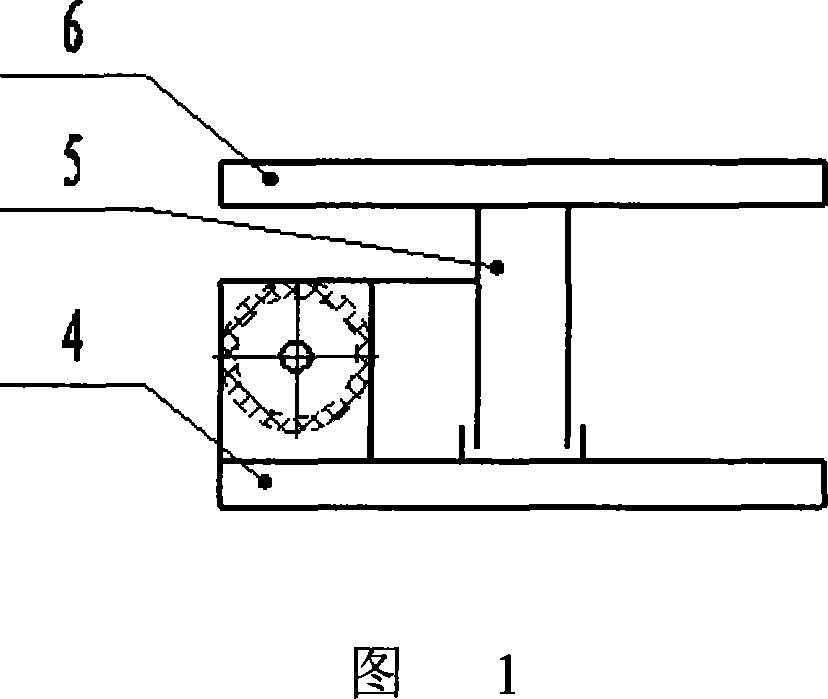
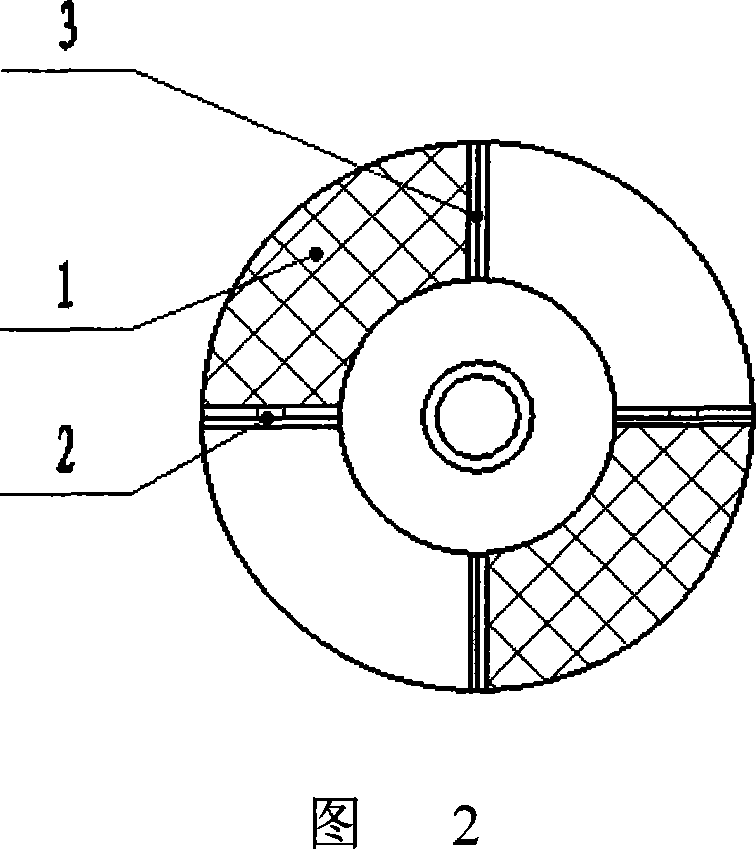
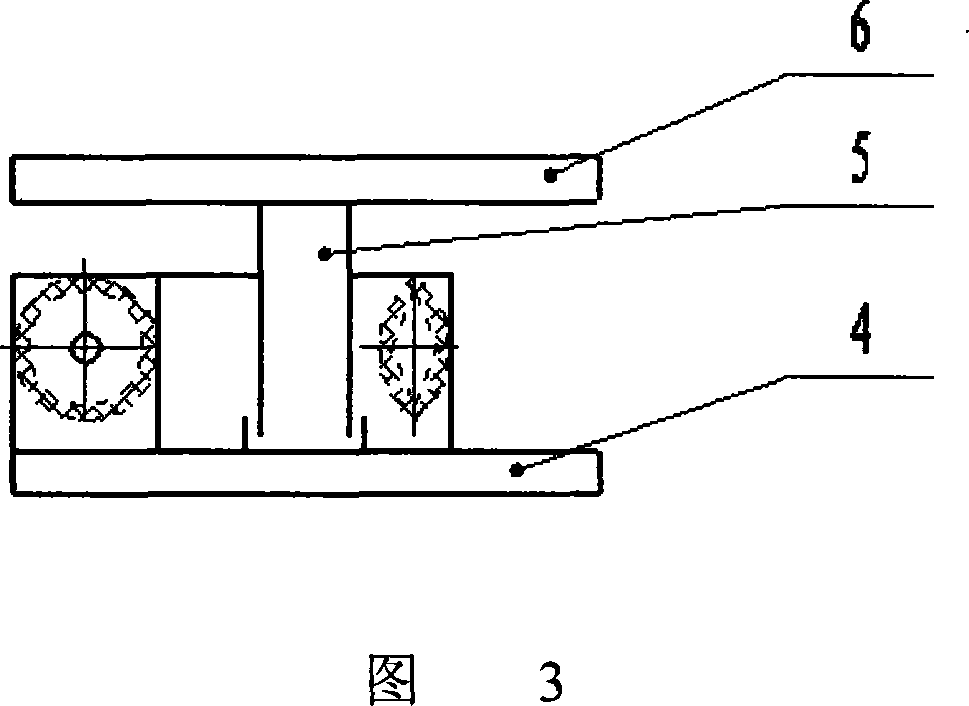
[0019] Referring to Figures 1 to 4, a pneumatic flexible torsion joint is composed of an arc-shaped pneumatic flexible cylinder 1, a first end cover 2, a second end cover 3, a fixed disc 4, a central shaft 5 and a circular turntable 6, and the arc The left and right ends of the shaped pneumatic flexible cylinder 1 are respectively connected with the first end cover 2 and the second end cover 3. Due to its inherent arc shape, the arc-shaped pneumatic flexible cylinder can ensure that it can elongate along the arc during rotation. or contraction; the first end cover 2 has a through hole to communicate with the outside atmosphere, and one end of the second end cover 3 is closed, and two arc-shaped pneumatic flexible cylinders 1 of the same size are symmetrically placed on the fixed disk 4 left and right in the center, and the fixed disk 4 is equipped with a central axis 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More