

Active wrist mechanism used for mechanical arm or snake shaped robot
A snake-shaped robot and robotic arm technology, applied in manipulators, manufacturing tools, joints, etc., can solve the problems of low modularity, complex robot wrist transmission system, and insufficiently compact structure, so as to facilitate system integration and compact overall shape. , compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
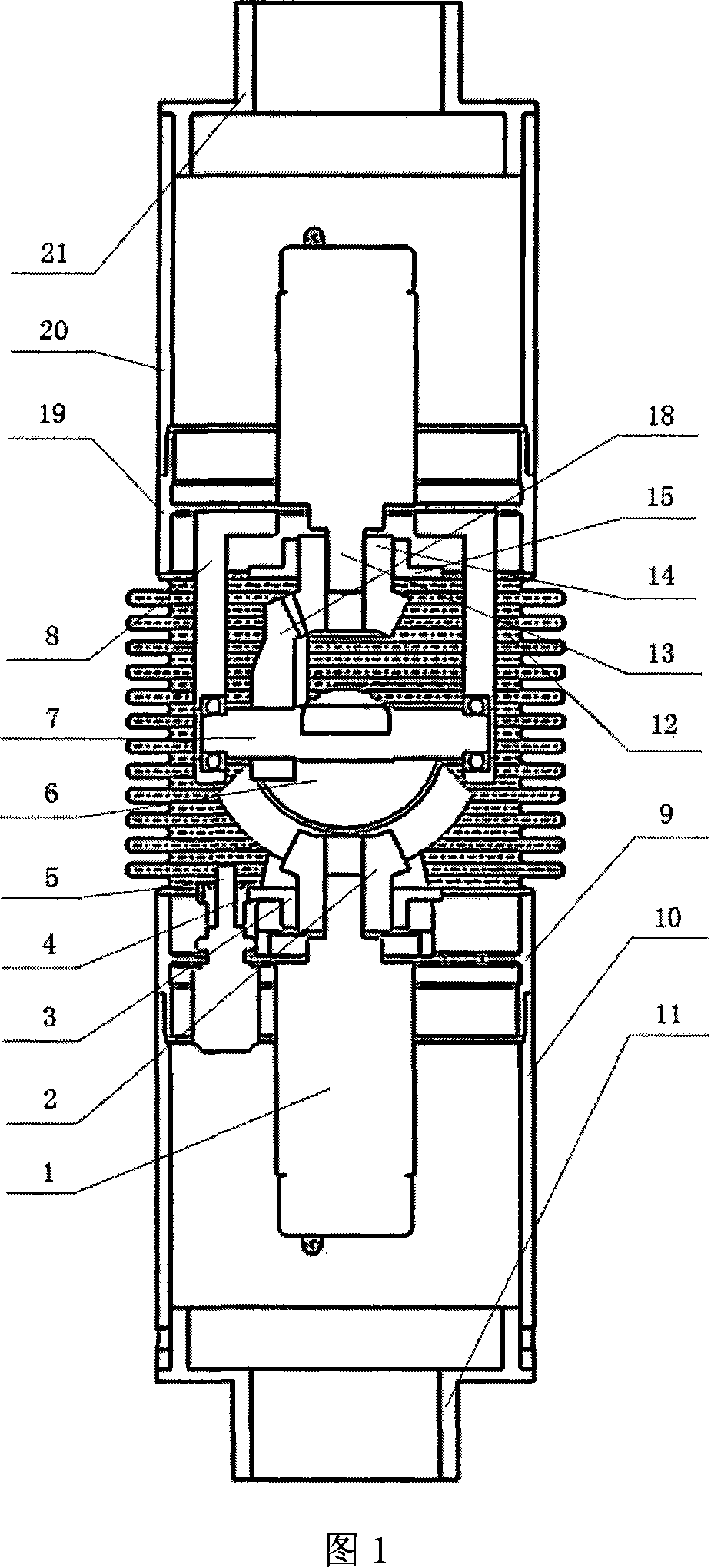
[0011] Embodiments of the present invention are described in detail below in conjunction with accompanying drawings: the present embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the scope of protection of the present invention is not limited to Examples described below.
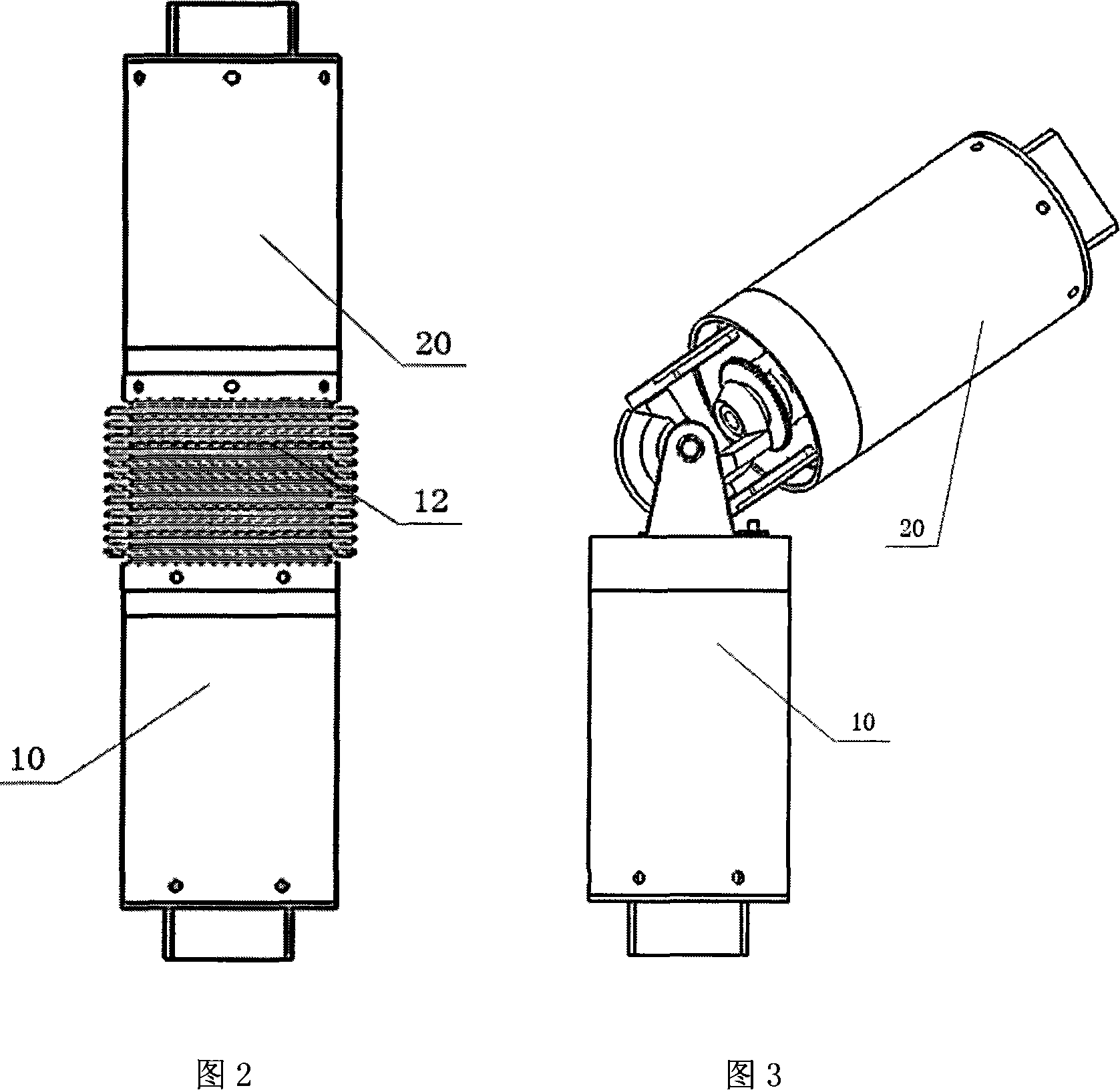
[0012] As shown in Figure 1, this embodiment includes: two motors 1 and 13, two bevel gears 2 and 14, two large gears 3 and 15, two pinion gears 4 and 16, two potentiometers 5 and 17, Two fan-shaped end face bevel gears 6 and 18, a cross-shaped coupling shaft 7, four brackets 8 (two of which are respectively arranged on the fixed end covers at an angle of 90 degrees to the other two), two fixed end covers 9 and 19, Two motor sleeves 10 and 20 , two coupling ends 11 and 21 , bellows 12 . The cross sections of the two motor sleeves 10 and 20 are hollow cylinders. The upper sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More