

Joint track type walking mechanism
A traveling mechanism and crawler-type technology, applied in the field of articulated crawler traveling mechanism, can solve the problems of weakened load capacity, insufficient technical solutions, difficult adjustment, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
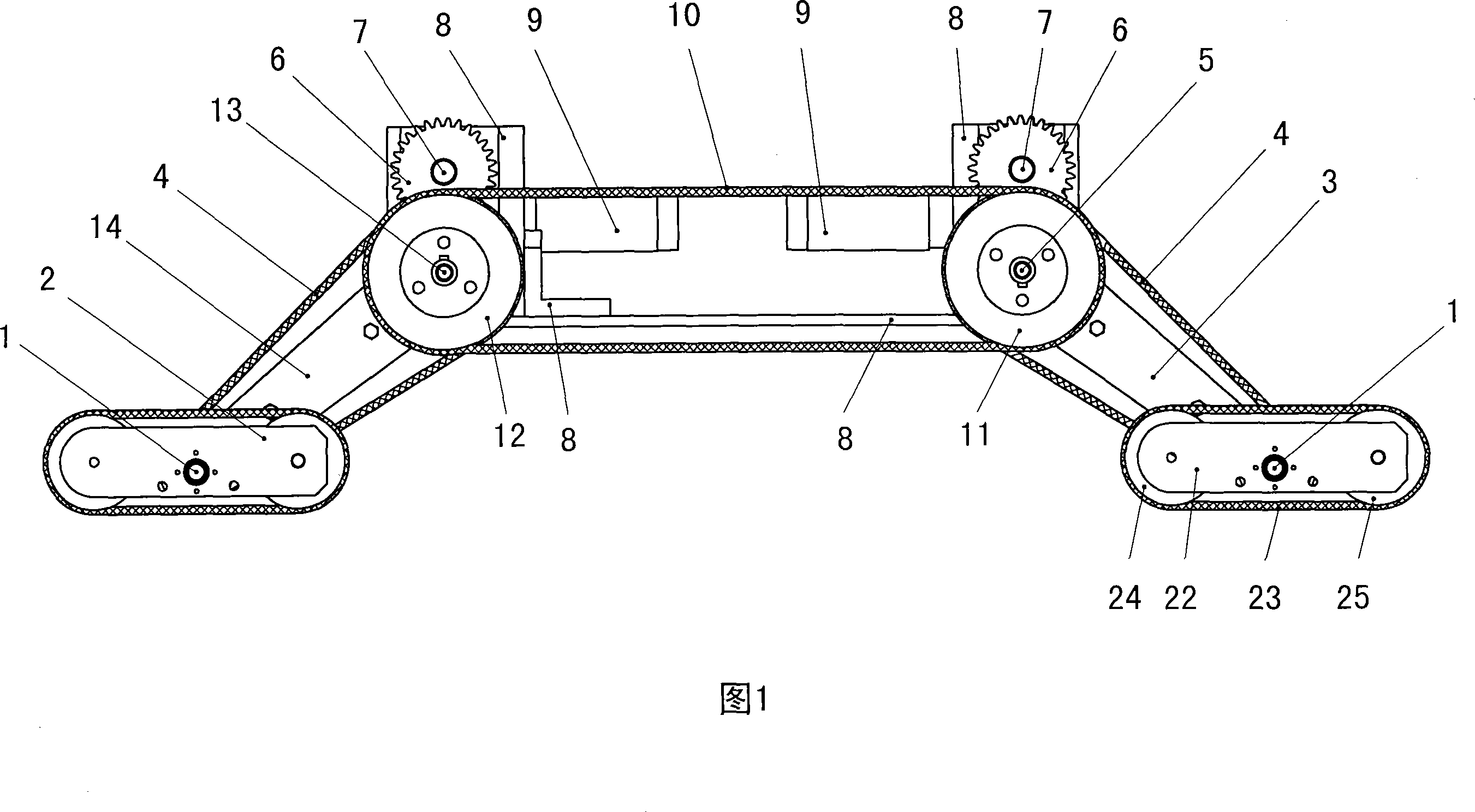
[0122] It will be described in conjunction with FIG. 7 , FIG. 18 and FIG. 19 . Fig. 7 is a schematic diagram of the crawler foot, Fig. 18 is a three-dimensional schematic diagram of the crawler foot, and Fig. 19 is a schematic diagram of the position of the rotary shaft of the crawler foot.
[0123] The labels in the figure will be explained first. 1 is the rotary shaft of the crawler foot, 22 is the foot support of the crawler, 23 is the walking crawler, 24 is the driving wheel of the crawler foot, 25 is the driven wheel of the crawler foot, 26 is the first gear (shown in dotted line), and 27 is the last gear (shown by the dotted line) Show), 28 is the second gear (shown in dotted line).
[0124]In this embodiment, the crawler foot transmission mechanism is composed of three gears meshing front and rear (shown by three dotted circles in Fig. 7), the first gear 26 is fixedly connected to the crawler foot rotary shaft 1, and the second gear 28 and crawler foot support 22 are ...
Embodiment 2
[0132] Description will be made in conjunction with FIG. 4 , FIG. 7 , FIG. 9 , FIG. 10 , FIG. 11 and FIG. 12 .
[0133] The labels in the figure will be explained first. 1 is crawler foot rotary shaft, 22 is crawler foot support, 23 is walking crawler belt, 24 is crawler foot driving wheel, 25 is crawler foot driven wheel, 26 is first gear, 27 is last gear, and 28 is second gear.
[0134] From the previous introduction and description, it can be known that one of the technical solutions of the present invention is that the axis position of the crawler foot rotary shaft 1 is low. angle, or even turn up to a 90° angle to climb over obstacles. How the running mechanism using this technical solution and other technical solutions works is further described below. In the walking mechanism of the present invention shown in Fig. 4, during the movement, the front end of the crawler foot 2 runs into the wall of the vertical obstacle, as shown in Fig. 9; The walking track 23 rotates a...
Embodiment 3
[0138] It will be described in conjunction with FIG. 13 , FIG. 14 , FIG. 15 , and FIG. 16 .
[0139] This embodiment introduces several obstacles that the running mechanism of the present invention can overcome.
[0140] Figure 13 is a crossing trench with a vertical wall in front and a slope in the back. The walking mechanism of the present invention can not only climb over, but also maintain good levelness all the time in the process of climbing over.
[0141] Figure 14 also crosses the ditch, but the front and rear of the ditch are all slopes. The walking mechanism of the present invention can not only climb over, but also maintain good levelness all the time in the process of climbing over. During the crawling process, the front track foot, synchronous track foot and rear track foot jointly participate in the drive.
[0142] Figure 15 is the situation when driving on swampy mud or soft ground. At this time, not only the crawler foot 2 is in contact with the ground, but ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More