

Biped Adsorption Wall Climbing Robot
A wall-climbing robot, adsorption-type technology, applied in the field of wall-climbing robots, can solve cumbersome and no-way problems, achieve stable movement, flexible direction change, and improve the ability to cross obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
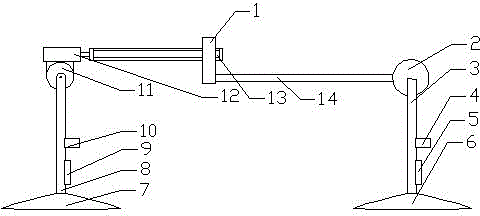
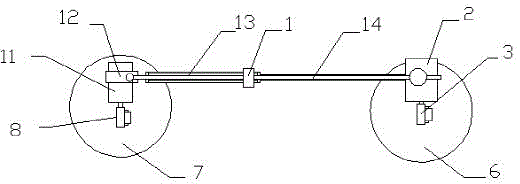
[0012] The following is a specific embodiment of the present invention, and the present invention will be further described in conjunction with the accompanying drawings.
[0013] Such as figure 1 and figure 2 Shown, a kind of two-foot adsorption type wall-climbing robot comprises a support rod I3 and a support rod II8; The solenoid valve I5 of the vacuum pump I4; the bottom end of the support rod II8 is provided with a rear suction cup 7, and the support rod II8 is also provided with a vacuum pump II10 connected to the rear suction cup 7 and a solenoid valve II9 for controlling the vacuum pump II10; the upper end of the support rod II8 is connected with a motor II11 , the support rod II8 is vertically fixed on the output shaft of the motor II11; the motor III12 is fixed on the motor II11, and the output shaft of the motor III12 is coaxially fixed with a horizontal transmission screw 13; the transmission screw 13 is equipped with a transmission nut 1; the transmission nut 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More