

Bionic anklebone
A technology of ankle joints and joint bearings, applied in the field of bionic ankle joints, can solve the problems of high energy consumption of active control and inflexible passive control, etc., and achieve the effect of reducing energy loss, compact structure and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Further illustrate the present invention below in conjunction with accompanying drawing.
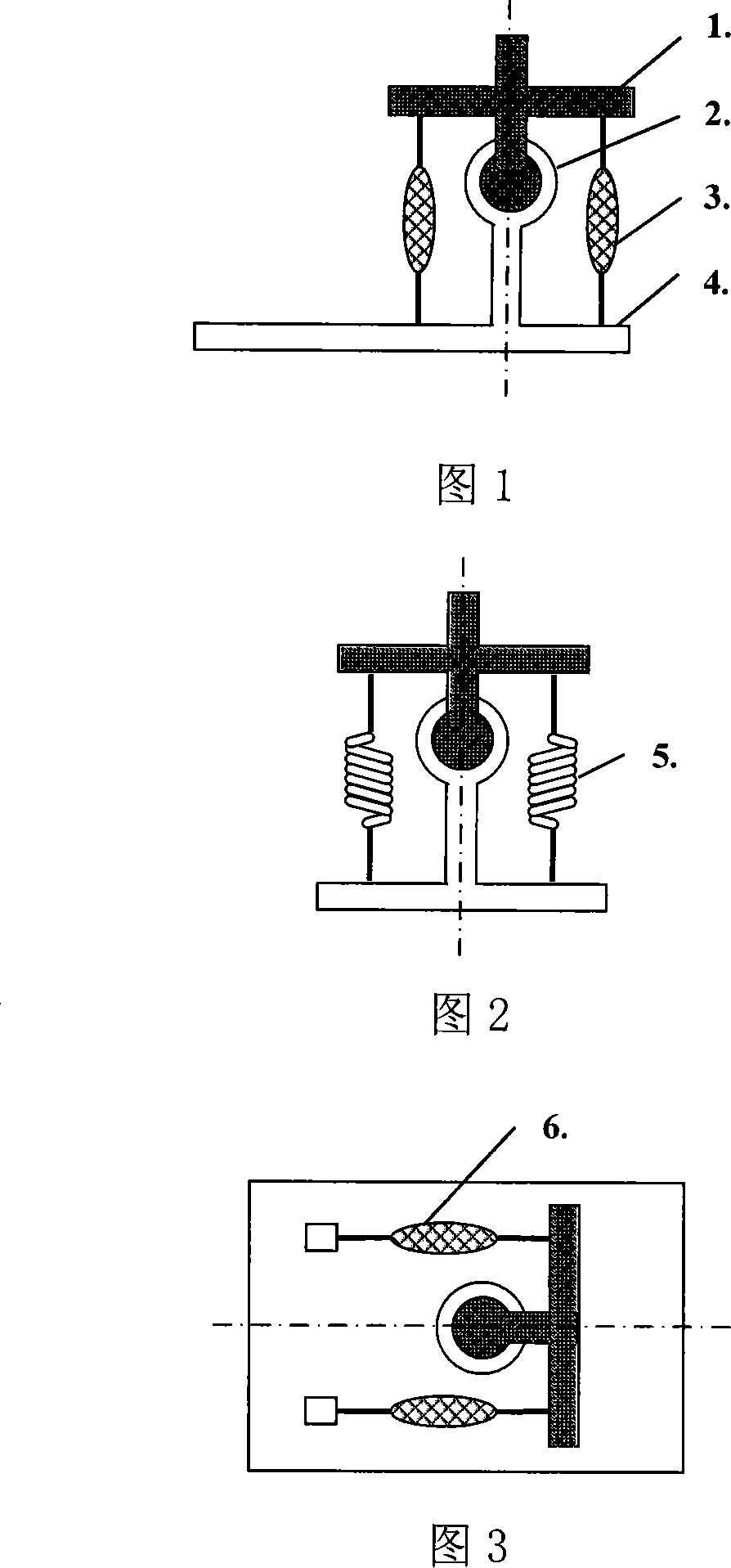
[0015] The ankle joint adopts the joint bearing 2, and the lifting and straightening motion of the ankle joint and the rotation motion around the axis of the calf are respectively controlled by a pair of pneumatic muscles. The lateral swing of the ankle joint is controlled by a pair of springs.
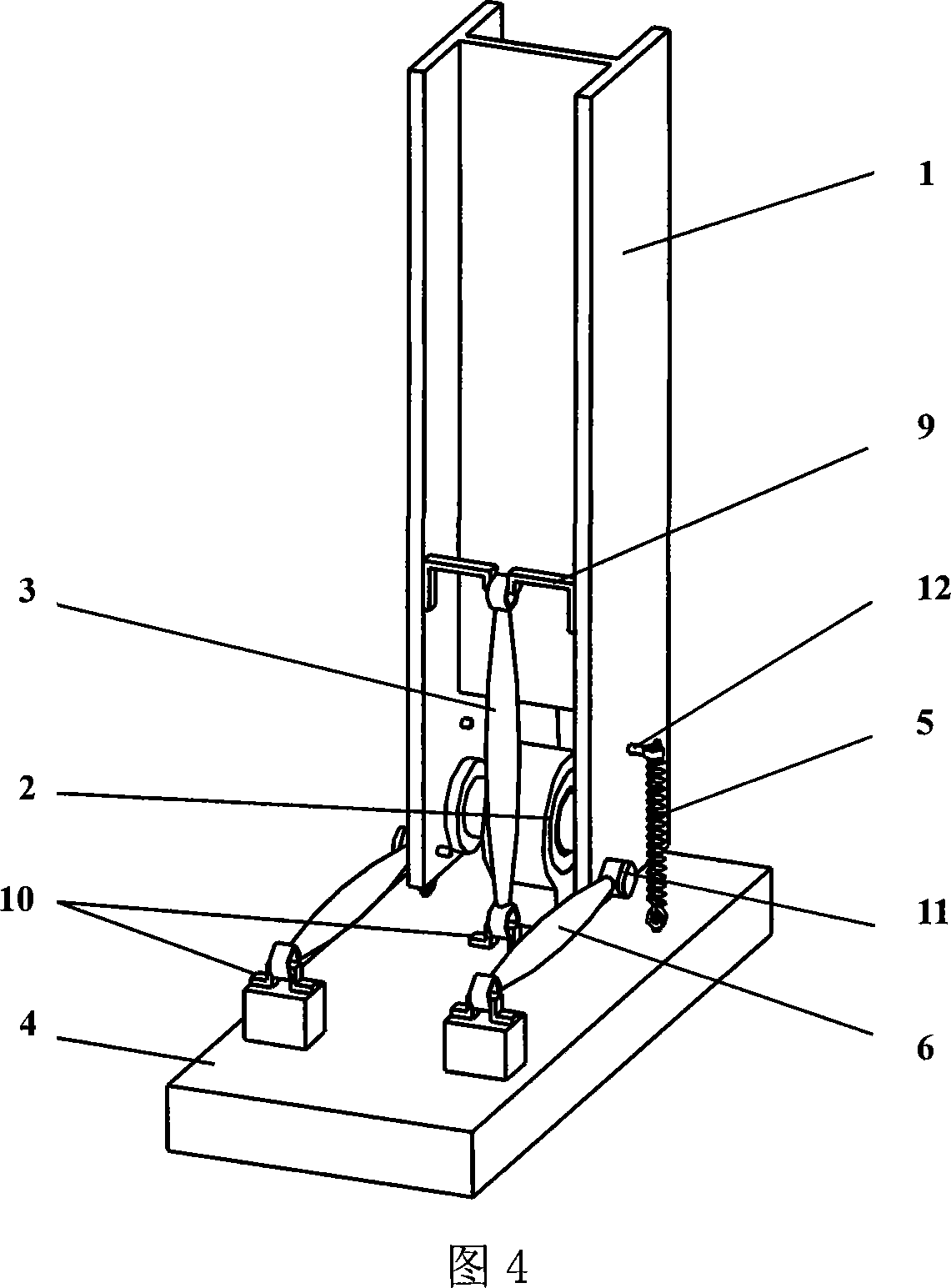
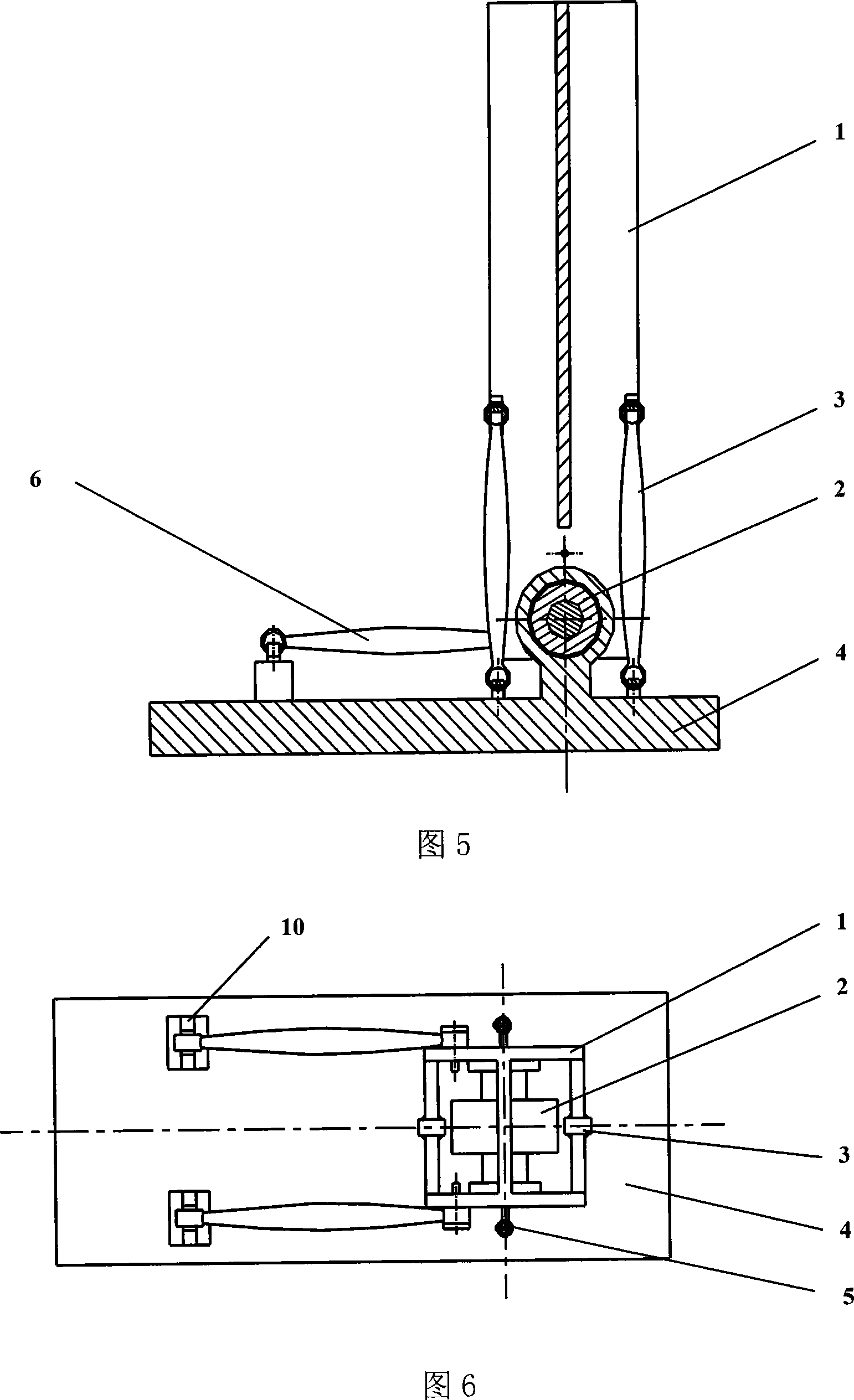
[0016] As shown in FIG. 1 and FIG. 4 , the bionic ankle joint includes a lower leg 1 , a centripetal joint bearing 2 , a first pneumatic muscle 3 , a spring 5 , a second pneumatic muscle 6 and a foot 4 . The inner ring of the centripetal joint bearing 2 is connected with the lower leg 1, the outer ring of the bearing is connected with the foot 4, and the outer ring rotates relative to the inner ring, driving the foot 4 to rotate relative to the lower leg 1. The specific connection methods are shown in Fig. 4, Fig. 5, Fig. 6 and Fig. 7. The lower leg 1 adopts an I-shaped plate, the outer ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More