

Artificial limb exoskeleton knee joint
A technology of exoskeleton and knee joints, applied in artificial legs, passive exercise equipment, physical therapy, etc., can solve the problems of low positioning accuracy and stability control, and achieve the effect of stable transmission and compact layout structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
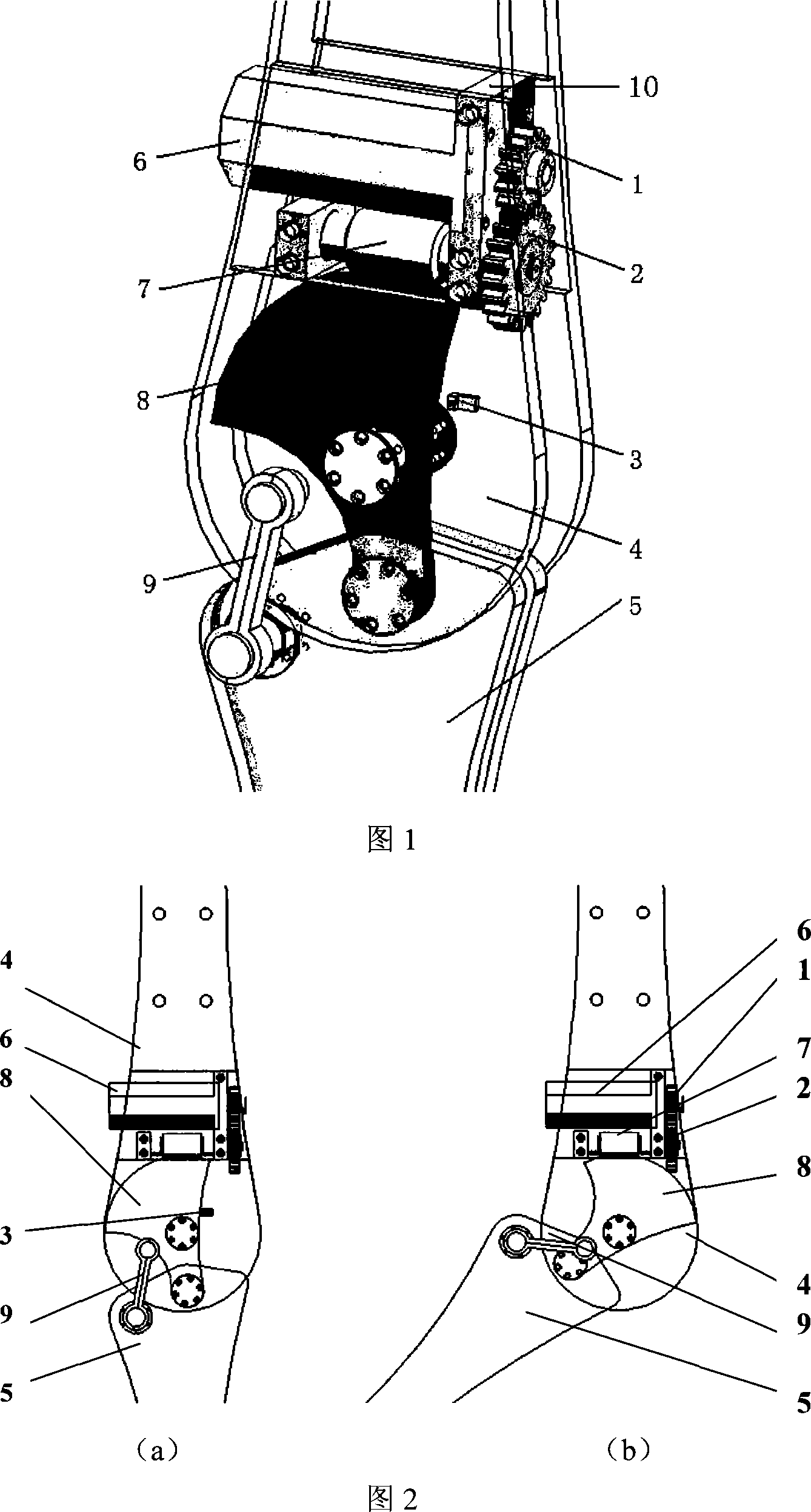
[0019] As shown in Figure 1, this embodiment includes: a servo motor 6, a four-bar linkage mechanism and a transmission mechanism. Gear 1, driven gear 2 and worm 7, the thigh exoskeleton 4 includes two plates, the servo motor 6 is fixed between the inner and outer plates of the thigh exoskeleton 4, the output shaft of the driving gear 1 and the servo motor 6 is affixed, and connected with the slave The driven gear 2 meshes, the driven gear 2 is installed on the shaft end of the worm 7, the worm 7 is fixed between the two plates of the thigh exoskeleton 4, the worm 7 m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More