

Global calibration for stereo vision probe
A probe and probe tip technology, applied in the field of global calibration system, can solve problems such as camera frame distortion error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
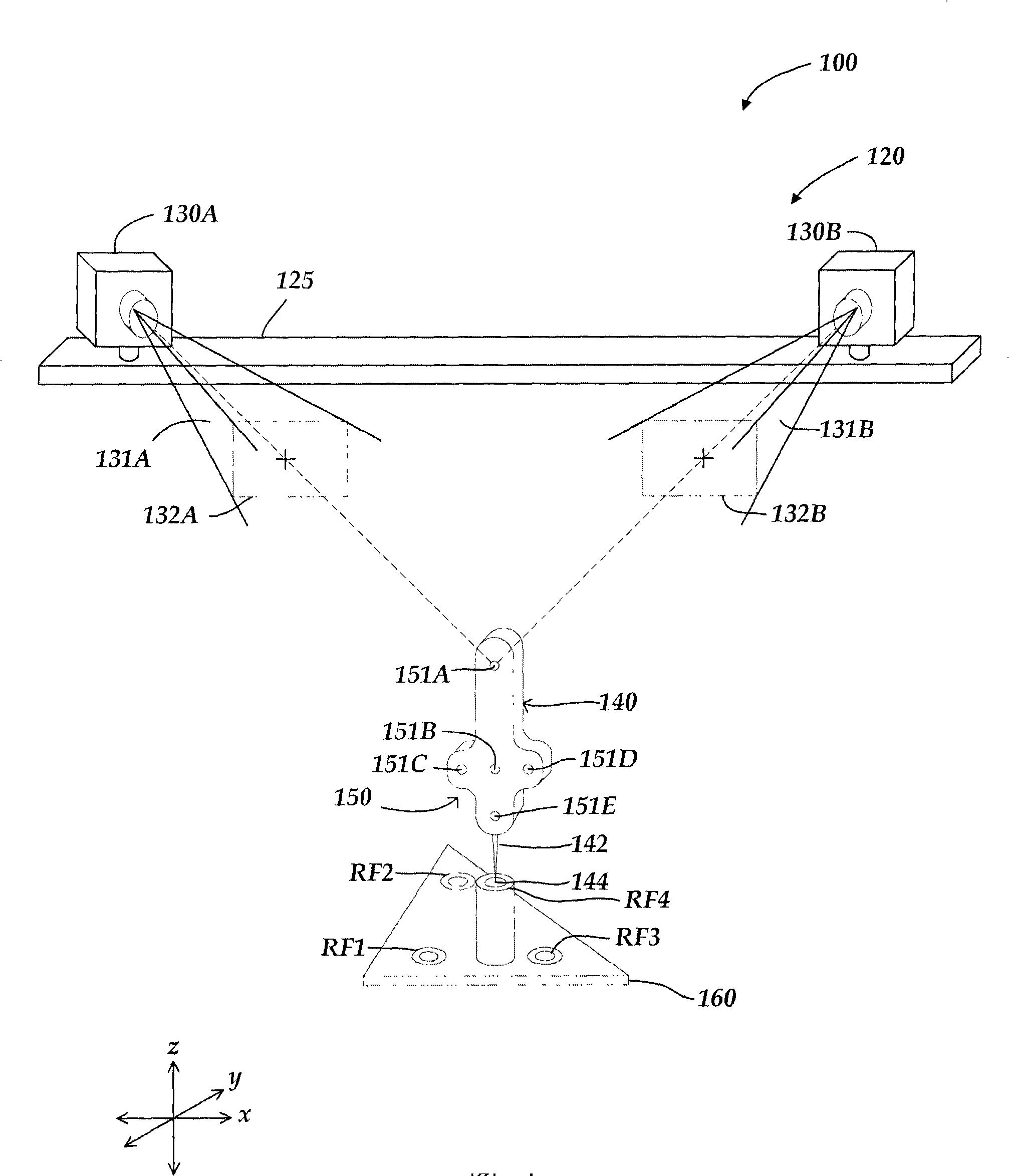
[0023] figure 1 is a schematic diagram of a first exemplary embodiment of a multiview touch probe system calibration arrangement 100 . Since this particular embodiment employs a typical two-camera stereo vision configuration, this configuration is interchangeably referred to as the stereo vision touch probe system calibration configuration 100 . The calibration arrangement 100 includes a stereo vision touch probe system 120 and a portable calibration fixture 160 . The stereo vision touch probe system 120 includes a mount 125 , two cameras 130A and 130B and a touch probe 140 . The body of touch probe 140 includes a marker pattern 150 comprising a series of individual markers 151A-151E imaged by stereo vision cameras 130A and 130B. Each individual marker 151A-151E may include an IR LED s or other light sources or any other type of marker that can be reliably imaged by a stereo vision camera. The end of the touch probe 140 also includes a stylus 142 having a probe tip 144 . ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More