Robot control method and robot
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of heavy calculation burden, degraded motion accuracy, weak modeling error, etc., achieve light calculation burden, improve reliability, and converge quick effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0035] Next, preferred embodiments for carrying out the present invention will be described with reference to the drawings.
[0036] (Structure of robot device)
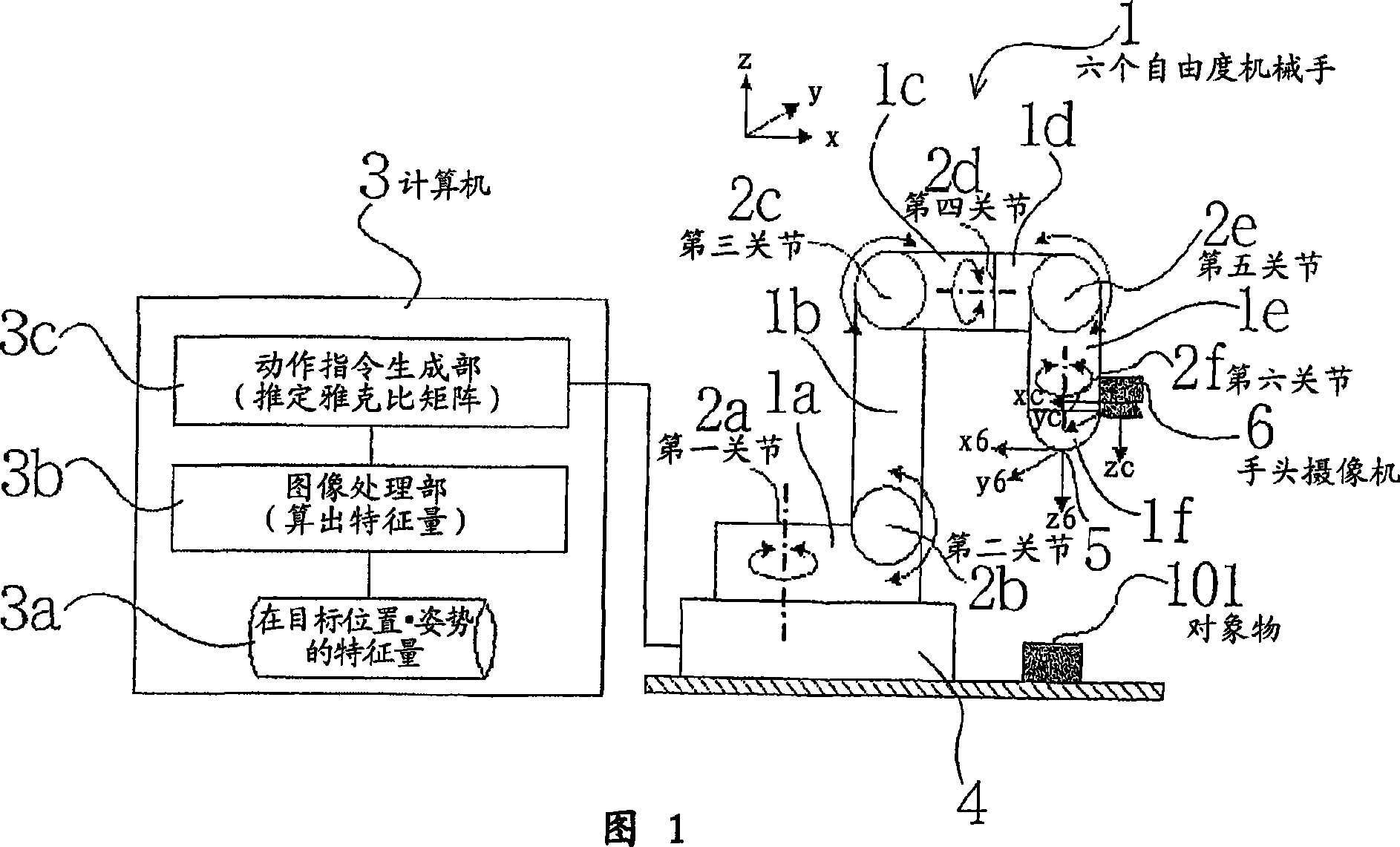
[0037] FIG. 1 is a schematic side view of the structure of a robot apparatus according to the present invention.
[0038] As shown in FIG. 1 , the robot apparatus according to the present invention has a manipulator 1 with six degrees of freedom, and the manipulator 1 can grip and transport an object 101 to be processed, or assemble it to other parts.
[0039]The manipulator 1 is composed of multiple actuators (driving devices) and linkages (rigid structural parts), and has six degrees of freedom. That is, the link rods are connected by rotatable (bent) or rotatable joints 2a, 2b, 2c, 2d, 2e, 2f, and are relatively driven by actuators. Each actuator is controlled by the computer 3 as the control unit.
[0040] In this manipulator 1, a first link (link of the base end portion) 1a is provided to connect the base end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More