

Foot gesture real-time detection system and method for human-imitated robot
A humanoid robot, real-time detection technology, applied in the field of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
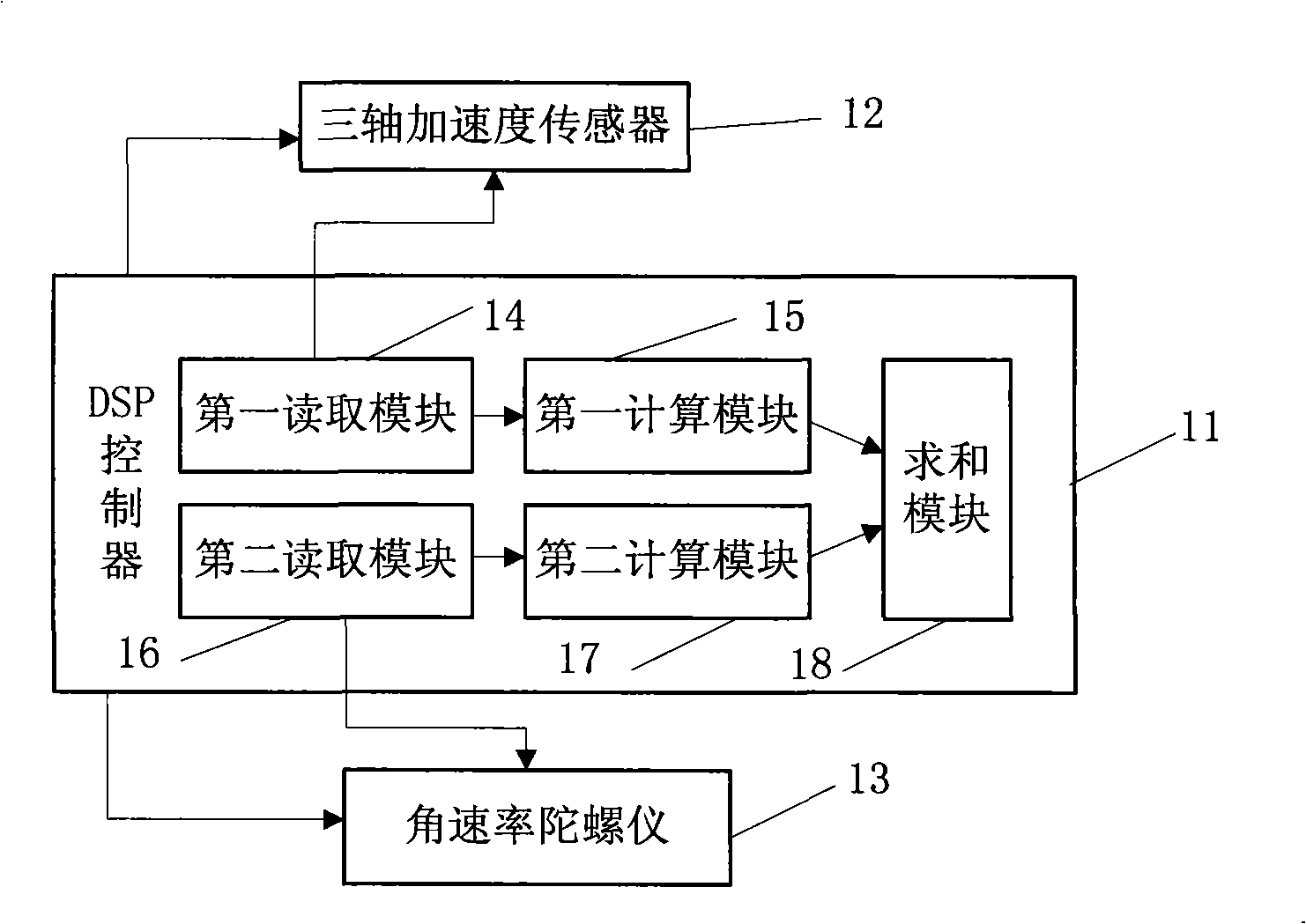
[0069] see figure 2 , the embodiment of the present invention provides a humanoid robot foot posture real-time detection system, the system includes: DSP (Digital Signal Processing, digital signal processing) controller 11, three-axis acceleration sensor 12, angular rate gyroscope 13.
[0070] The DSP controller 11 is used to write a control signal to the three-axis acceleration sensor 12, and calculate the output of the three-axis acceleration sensor 12 to obtain static inclination angle information;
[0071] The DSP controller 11 is also used to write the control signal to the angular rate gyroscope 13, and calculate the output of the angular rate gyroscope to obtain the angle change value;
[0072] The DSP controller calculates according to the obtained static inclination angle information and angle change value to obtain real-time inclination angle information.
[0073] Among them, the DSP controller specifically includes:
[0074] The first reading module 14 is used to...
Embodiment 2
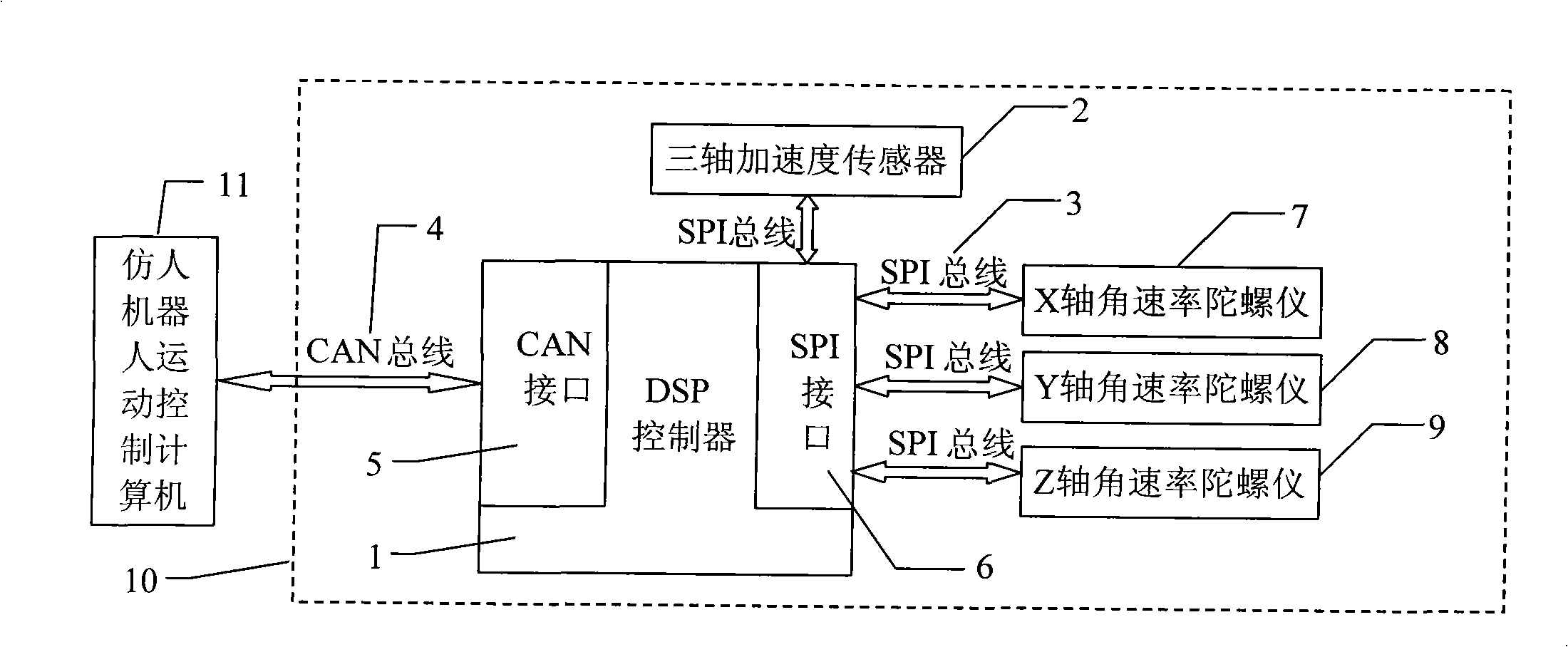
[0103] see image 3 , the embodiment of the present invention provides a humanoid robot foot posture real-time detection system, the system specifically includes: DSP controller 1, three-axis acceleration sensor 2, angular rate gyroscope, SPI (Serial Peripheral Interface, serial Synchronous communication protocol) bus 3, CAN (Controller Area Network, controller area network) bus 4.
[0104] Wherein, the DSP controller includes CAN interface 5 and SPI interface 6;
[0105] The three-axis acceleration sensor 2 is connected to the SPI interface 6 of the DSP controller 1 through the SPI bus 3, and is used to measure the acceleration of the mutually orthogonal x, y, and z axes; the x-axis angular rate gyroscope 7, the y-axis angular rate gyroscope 8 and the z-axis angular rate gyroscope 9 are respectively connected to the SPI interface 6 of the DSP controller 1 through the SPI bus 3 for measuring the angular rate information of the x, y, and z axes.
[0106] The model of the thre...
Embodiment 3
[0140] see Figure 4 , the embodiment of the present invention provides a real-time detection method of foot posture information of a humanoid robot, specifically including:
[0141] Step 101: Initialize each sensor.
[0142] Step 102: Collect triaxial acceleration information.
[0143] Step 103: Calculate the collected triaxial acceleration information to obtain static foot inclination information.
[0144] This embodiment takes the x-axis as an example to introduce how to calculate the static inclination angle according to the acceleration information. see Figure 5 , let Ax be the acceleration value output by the x-axis acceleration sensor, in g; θx is the angle between the x-axis and the horizontal plane; the gravitational acceleration is 1g.
[0145] Under static conditions, the acceleration sensor is only affected by the acceleration of gravity, so the acceleration value Ax output by the acceleration sensor is only related to the acceleration of gravity 1g and the an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More