

Numerical controller for controlling a five-axis machining apparatus
一种数值控制器、加工设备的技术,应用在通用控制系统、程序控制、计算机控制等方向,能够解决很难线性轴平移补偿旋转补偿旋转轴平移补偿等问题,达到容易测量的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
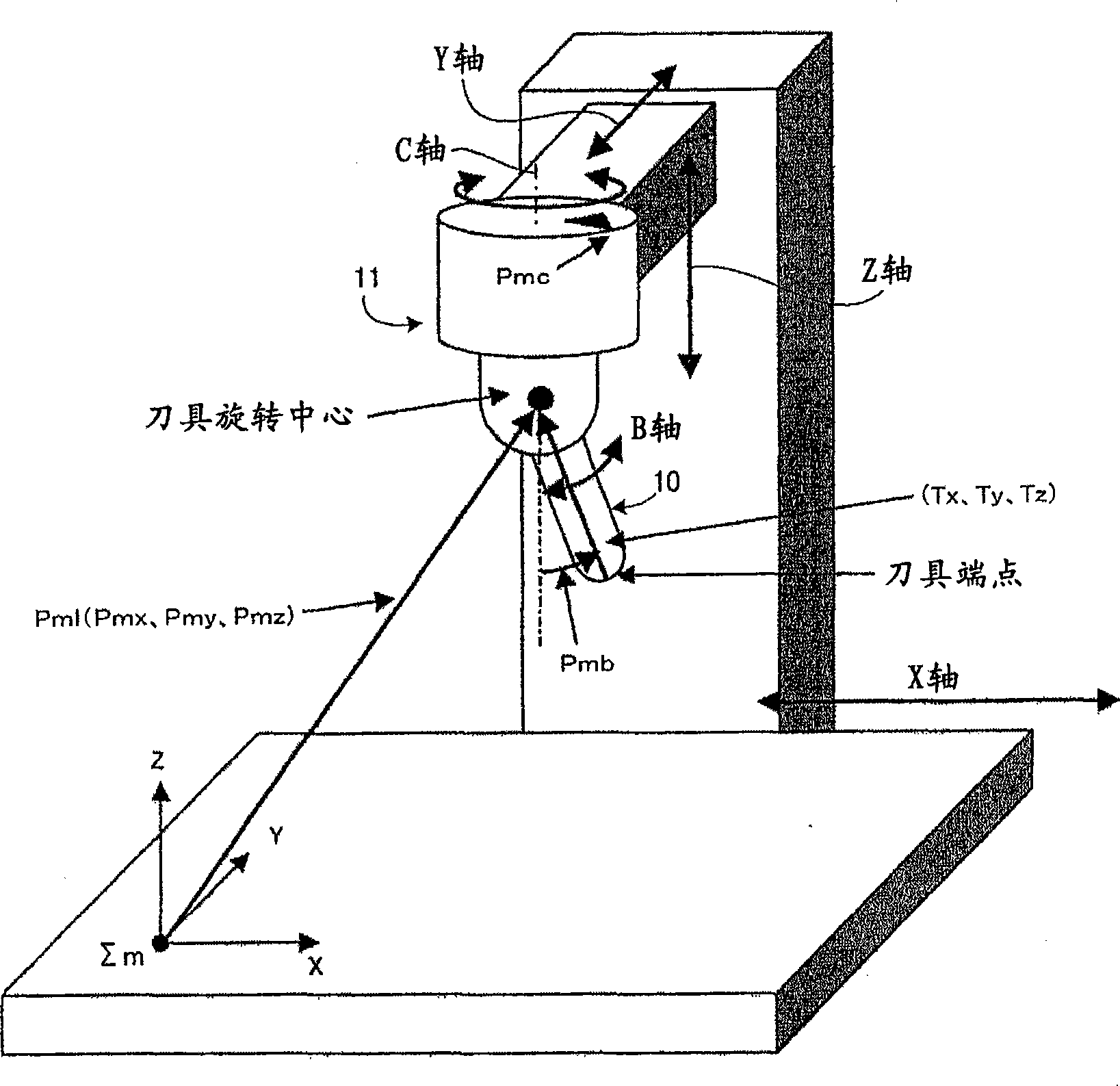
[0047] An embodiment of a numerical controller of the present invention for controlling a five-axis machining apparatus will be described below with reference to the accompanying drawings. Five-axis machining equipment is generally classified into three types, namely, a tool head rotary type, a table rotary type, or a hybrid rotary type (in which both the tool head and the table are rotatable).
[0048] figure 1 An example five-axis switchgear is shown controlled by a numerical controller of the present invention. figure 1 The example in is the cutter head rotary type, in which the cutter head 11 rotates.
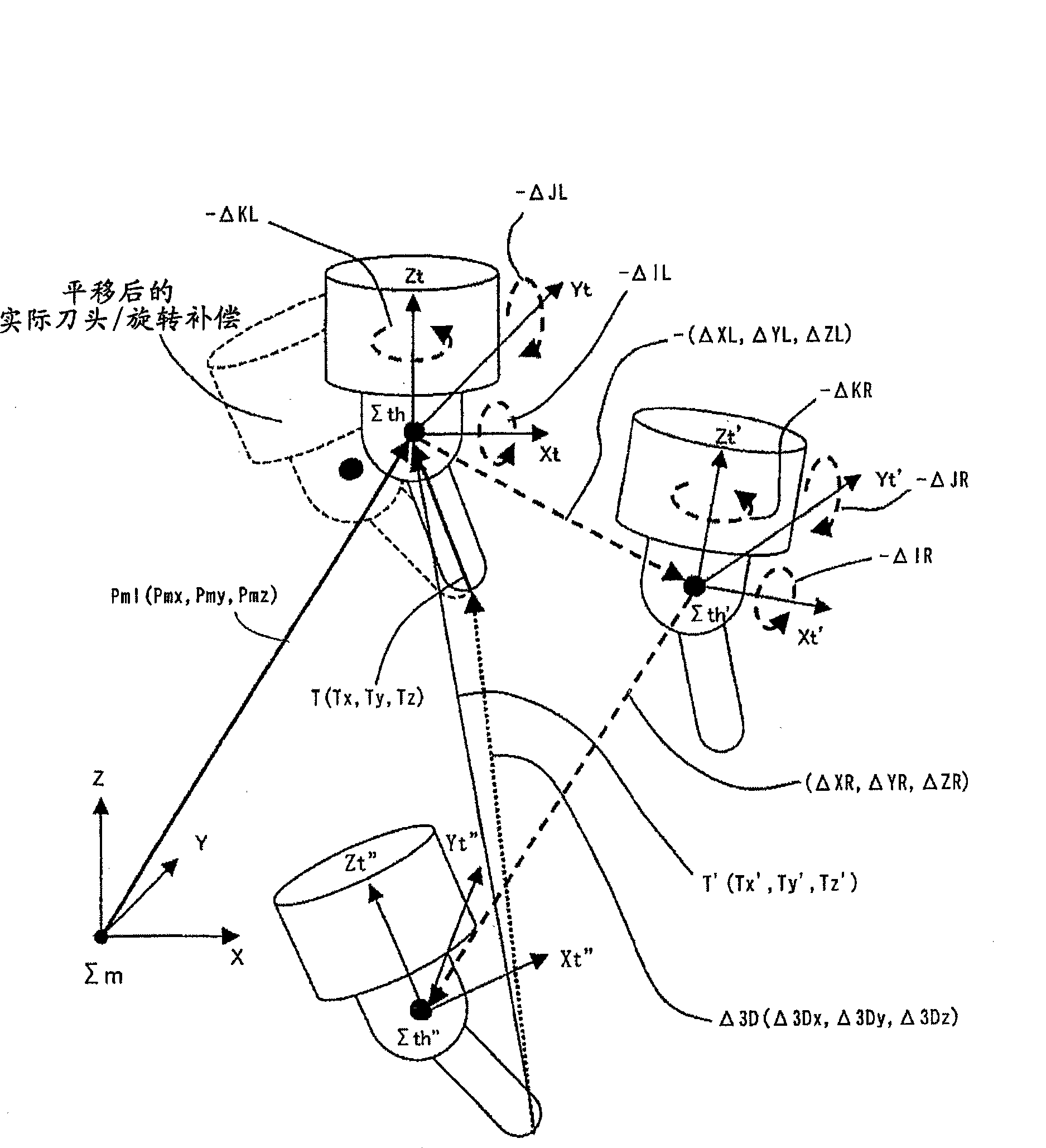
[0049] refer to figure 2 A rotation error, a translation error, and compensation for these errors in a head rotation type five-axis machining apparatus will be described. The figure shows a tool head coordinate system Sth(Xt, Yt, Zt), which has the same origin as the center of rotation of the tool head 11 . As shown in the figure, the tool head coordinate system Sth is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More