

Interactive C language based multi-bus modularization robot controller
A C language and controller technology, applied in digital control, electrical program control, program control manipulator, etc., can solve the problems of unguaranteed system stability, weak expansion ability, and limited scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
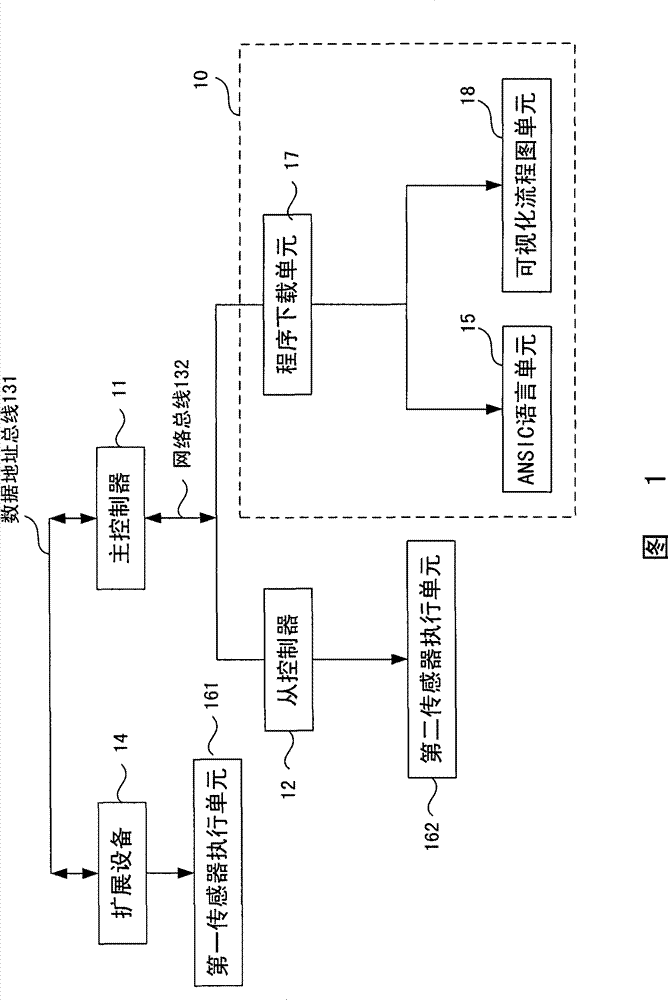
[0016] figure 1 Shown is a block diagram of the present invention. Wherein, the multi-bus modular robot controller based on interactive C language is mainly composed of a master controller 11 , M slave controllers 12 , a bus 13 , N expansion devices 14 and an interactive C language development module 10 . This bus 13 includes a data address bus 131 and a read / write enable bus or various standard network buses 132 between all modules, such as CAN, SCI, SPI, I2C, Ethernet bus, and is connected to N each An expansion device 14 and a slave controller 12 to realize data interaction.
[0017] The expansion equipment 14 includes several types of AD expansion equipment, DA expansion equipment, DI expansion equipment, and DO expansion equipment. Each expansion equipment is used to collect analog and digital signals provided by the corresponding first sensor execution unit 161. Devices and DO expansion devices are mainly used to control analog and digital signals.
[0018] Wherein, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More