

Articulated flexible manipulator
A manipulator and multi-joint technology, which is applied in the direction of manipulators, agricultural machinery and implements, picking machines, etc., can solve problems such as damage, manipulator difficulty, difficult precise calculation and control, etc., and achieve the effect of reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below is working principle and working process of the present invention:
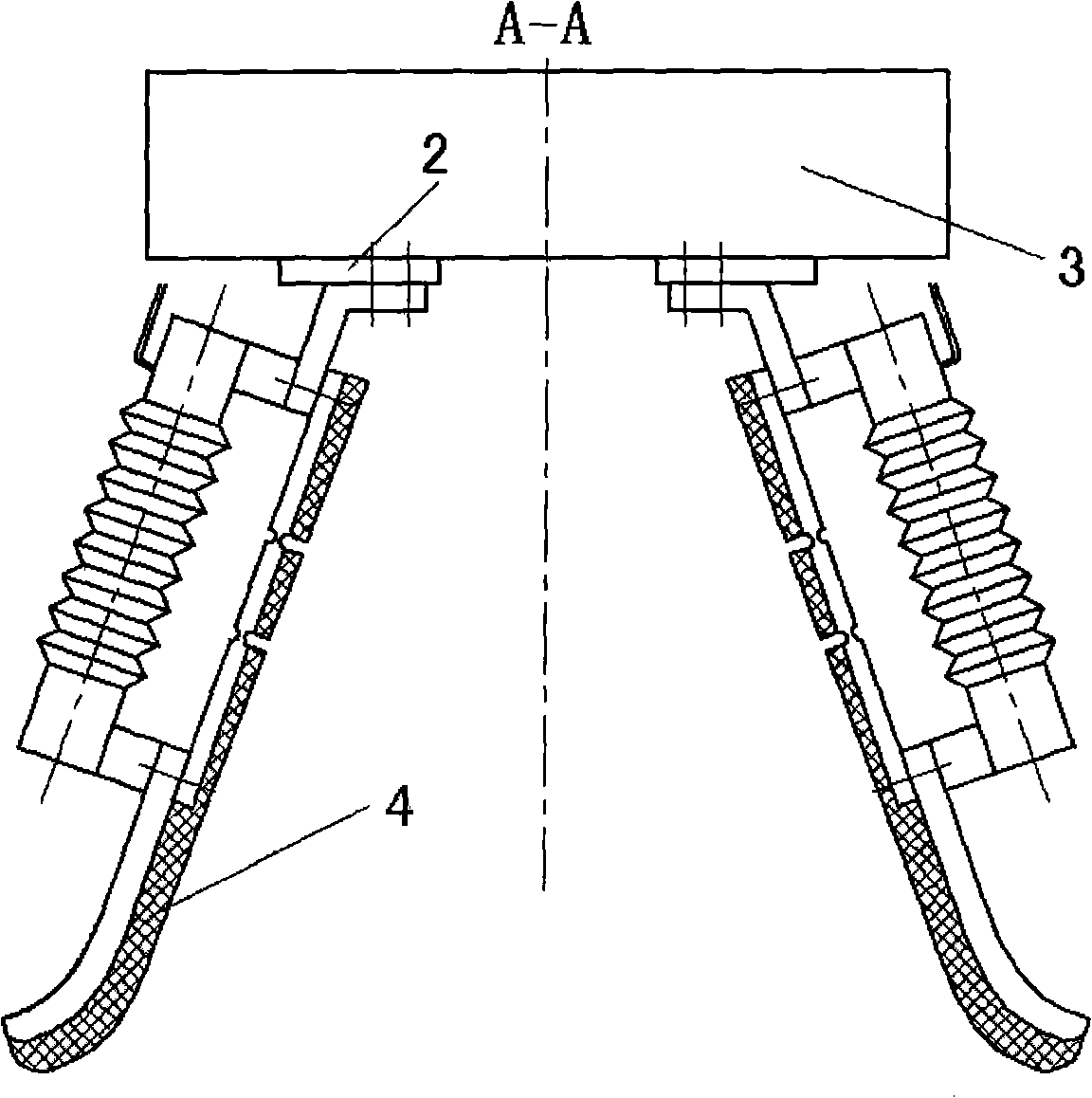
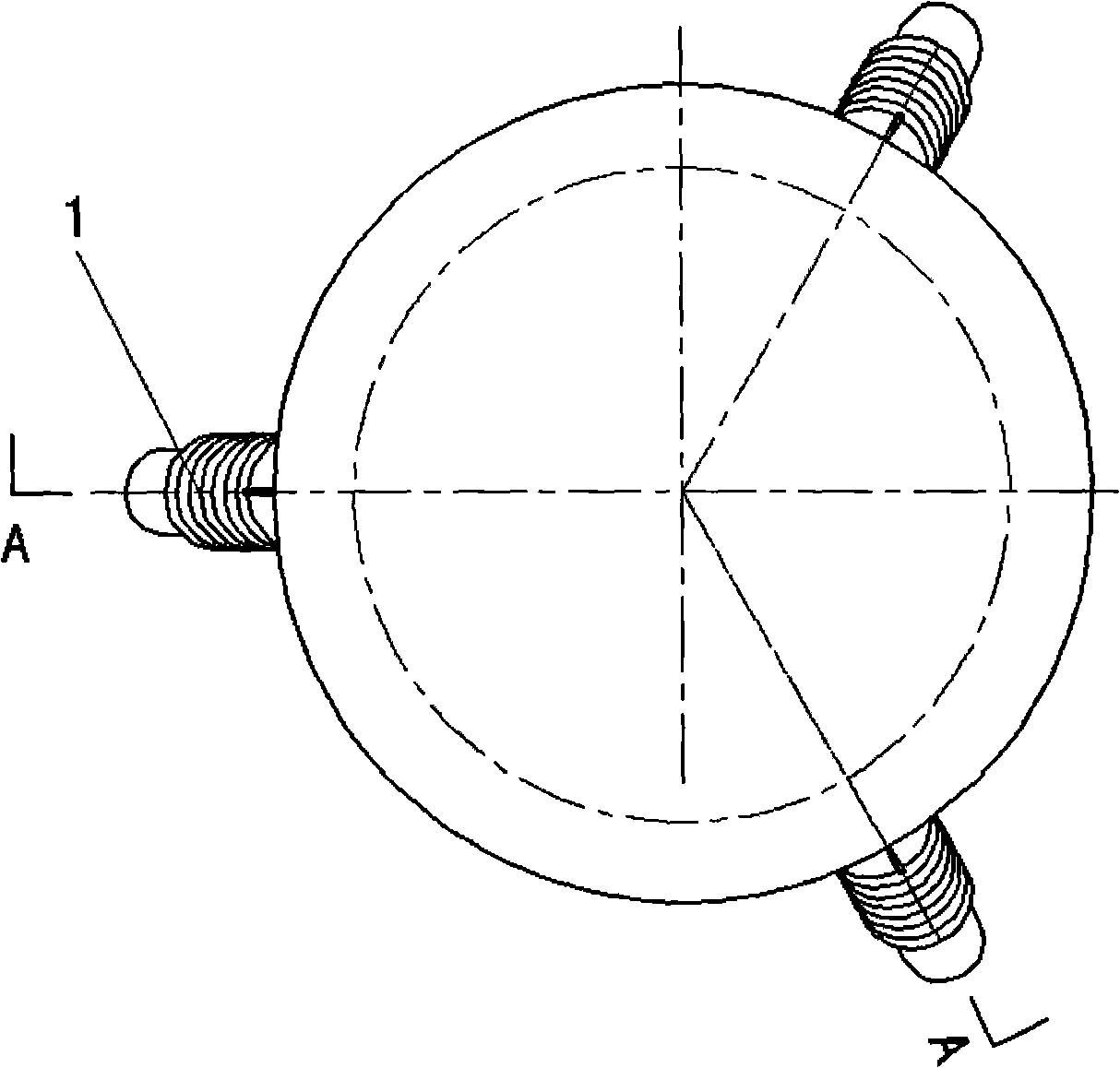
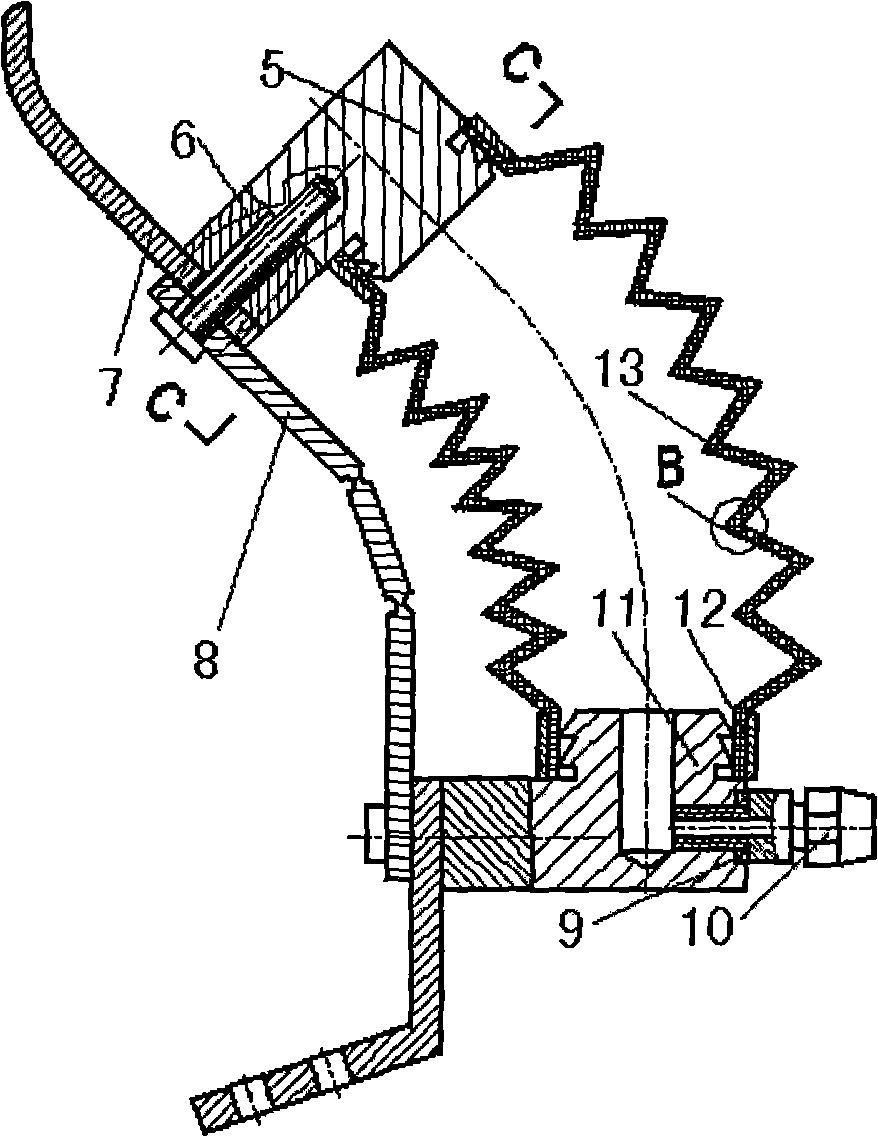
[0025] The fluid enters the inner cavity of the expansion muscle 13 through the joint 10, and an eccentric moment is generated, so that the two flexible hinge frames 8 or the two loose-leaf hinge frames 18 rotate counterclockwise at the hinge, and the three dexterous fingers bend simultaneously, and the object is grasped. The angle change of each hinge of the dexterous fingers is related to the magnitude and position of the grasping force, and due to the flexibility of the expanded muscles, a flexible and adaptive grasping effect is produced. The pressures in the inner cavities of the expansion muscles 13 of the three dexterous fingers can be the same and controlled by time; the pressures in the inner cavities of the expansion muscles 13 of each dexterous finger can also be individually adjusted and controlled by pressure.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More