

Obstacle-jumping robot provided with variable diameter wheels
A robot and wheel technology, applied in the direction of wheel, wheel axle combination, transportation and packaging, etc., can solve the problems of complex structure, discontinuity, poor ride comfort, etc., and achieve the effect of improving the ability of overcoming obstacles and maintaining maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be further described in detail below in conjunction with the accompanying drawings.
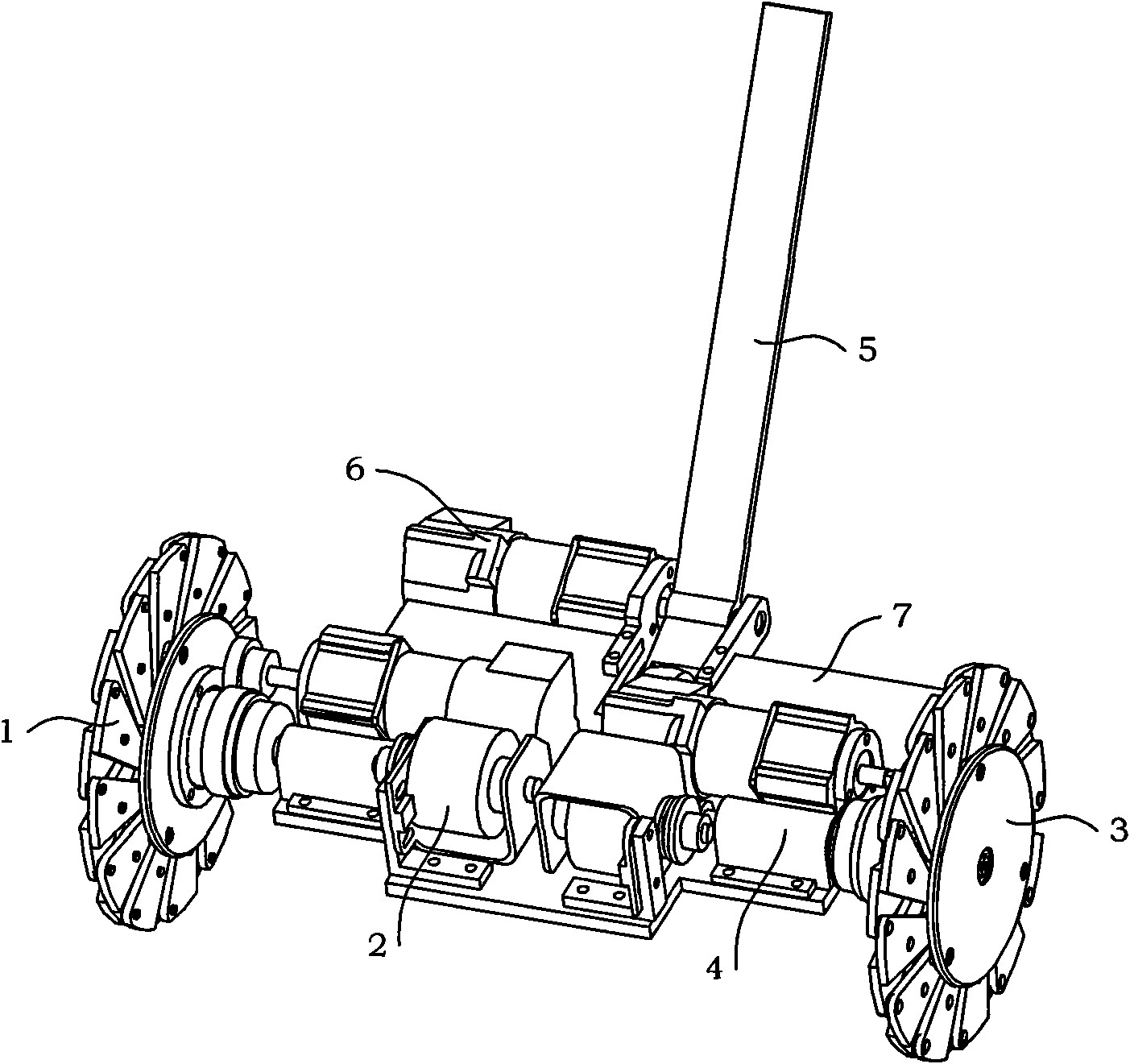
[0072] see figure 1 As shown, the present invention is an obstacle-surmounting robot with variable diameter wheels, which includes a left wheel assembly 1, a left wheel drive assembly 2, a right wheel assembly 3, a right wheel drive assembly 4, an overturn assembly 5, an overturn drive assembly 6 and a chassis Assembly 7; wherein the left wheel assembly 1 has the same structure as the right wheel assembly 3; the left wheel drive assembly 2 has the same structure as the right wheel drive assembly 4;
[0073] (1) left wheel assembly 1
[0074] see figure 1 , Figure 6 , Figure 6A ~ Figure 6G As shown, the left wheel assembly 1 includes a left wheel axle 101, a left wheel hub 104, a left wheel connecting ring 105, six left reducing rods and twenty-four left rim pieces, and every twelve left rim pieces are assembled according to a circular distribution. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More