

Method and device for tracking dense depth images
A depth image and depth tracking technology, which is applied in the field of dense depth image tracking, can solve the problems of time-consuming calculation of optical flow field, complex tracking algorithm, long tracking time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
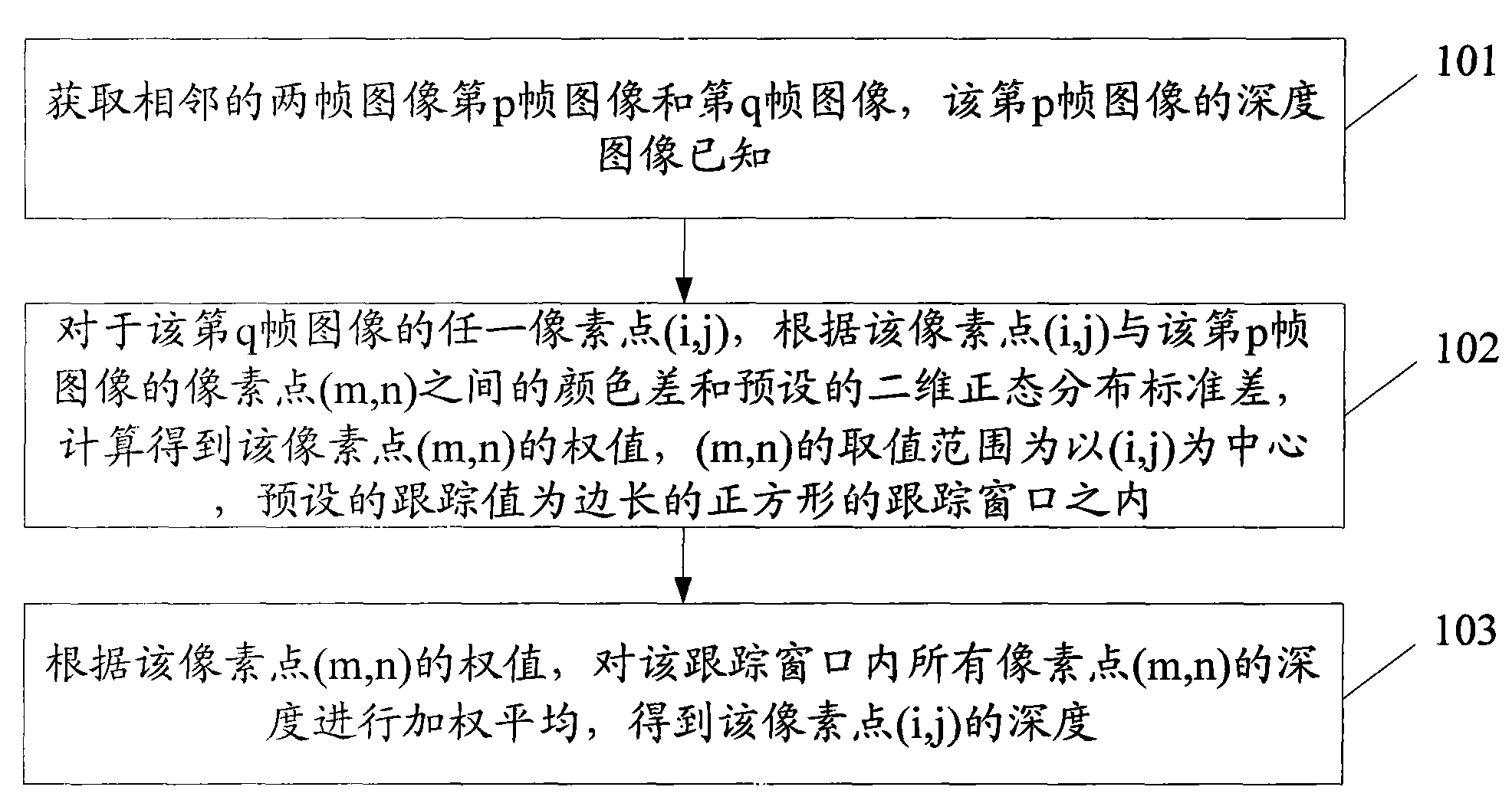
[0094] see figure 1 , the present embodiment provides a method for dense depth image tracking, the method comprising:
[0095] 101: Obtain the p-th frame image and the q-th frame image of two adjacent frames of images, and the depth image of the p-th frame image is known;
[0096] Specifically, the frame number of the p-th frame image is p, and the frame number of the q-th frame image is q; when pq, the qth frame image is the previous frame image of the pth frame image, that is, backward tracking.
[0097] 102: For any pixel point (i, j) of the qth frame image, according to the color difference between the pixel point (i, j) and the pixel point (m, n) of the pth frame image and preset The standard deviation of the two-dimensional normal distribution is calculated to obtain the weight of the pixel point (m, n), the value range of (m, n) is centered on (i, j), and the default tracking value is the side length within the square tracking window of
[0098] Wherein, when calcula...
Embodiment 2
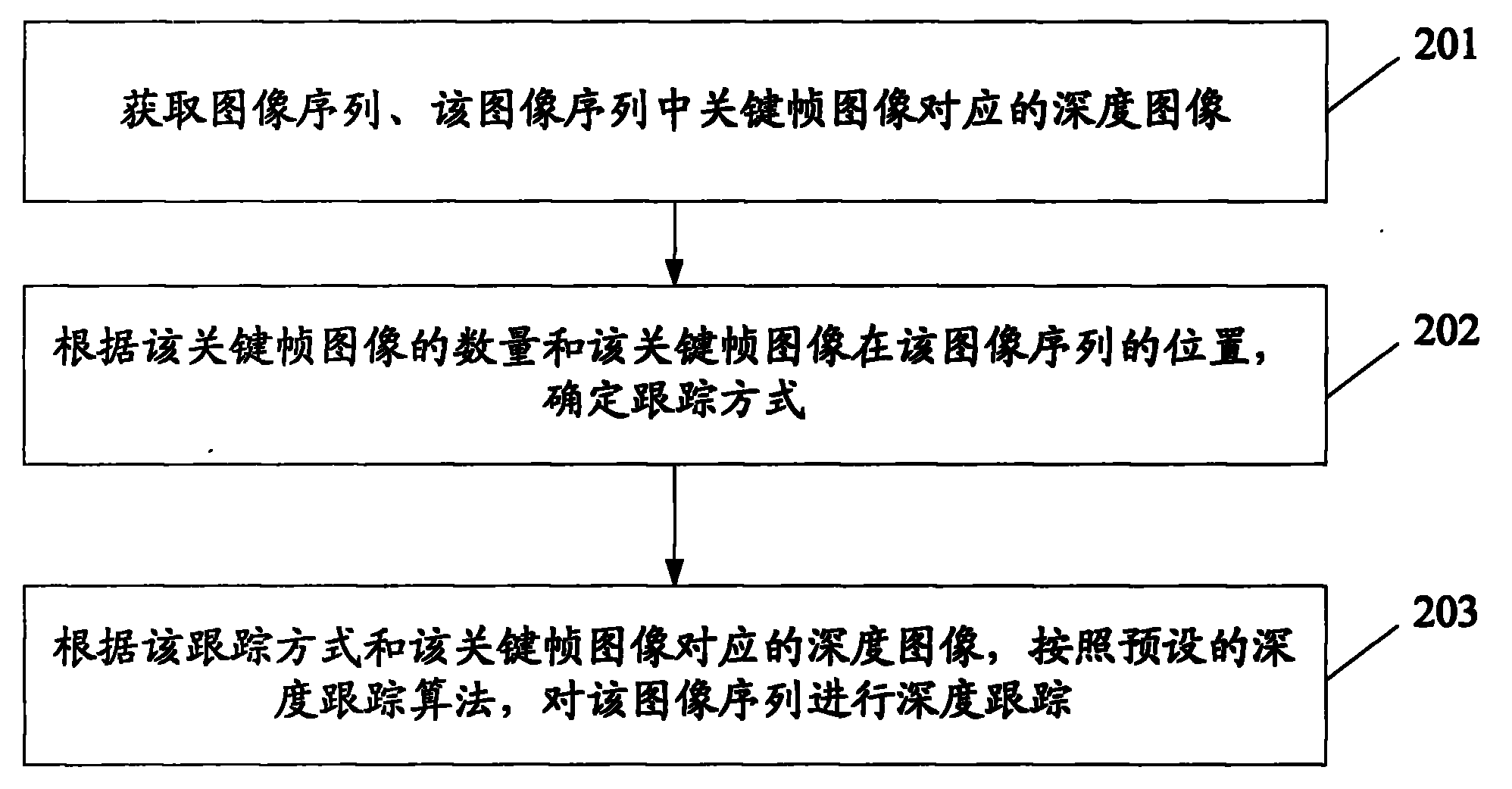
[0120] see figure 2 , the embodiment of the present invention provides another dense depth image tracking method, including:
[0121] 201: Obtain an image sequence and a depth image corresponding to a key frame image in the image sequence;
[0122] Wherein, the depth image refers to a grayscale image obtained by quantizing the distance of each pixel in the plane image from the camera in the real world to 0-255. Generally speaking, the pixel farthest from the camera in the image is quantized to 0, and the pixel closest to the camera is quantized to 255, and the distances of the remaining pixels have different quantization algorithms, such as: linear quantization, piecewise linear quantization, binary Subfunction quantization, etc.
[0123] Wherein, the image sequence includes key frame images and non-key frame images. A key frame image, in this embodiment of the present invention, refers to an image that already has a depth image before tracking starts, and may be any frame i...
example 1
[0148] Example 1: The input image sequence is the 1st to 100th frame of the head rotation, the key frame is set to the 1st frame, and the standard deviation parameter of the two-dimensional normal distribution is set to sigma=8, and the tracking window size parameter box_size=7. Since there is only one key frame and it is the first frame of the image sequence, the method of forward tracking is adopted. Get the first frame and its depth image and the second frame image, input the preset depth tracking algorithm, and calculate the depth image of the second frame; then take the second frame and its depth image and the third frame image, input the preset Depth tracking algorithm, calculate the depth image of the third frame; loop in turn until all the depth images of 100 frames are obtained.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More