

Gliding robot that can jump and take off autonomously
A gliding robot and jumping technology, which is applied in the fields of wireless sensor networks, bouncing robots, and flying robots. Quick return characteristics, the effect of increasing flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
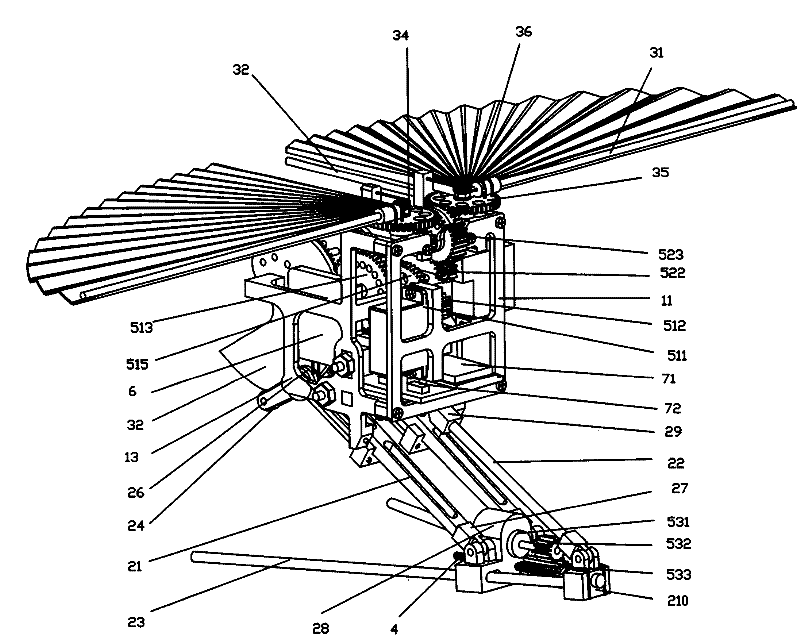
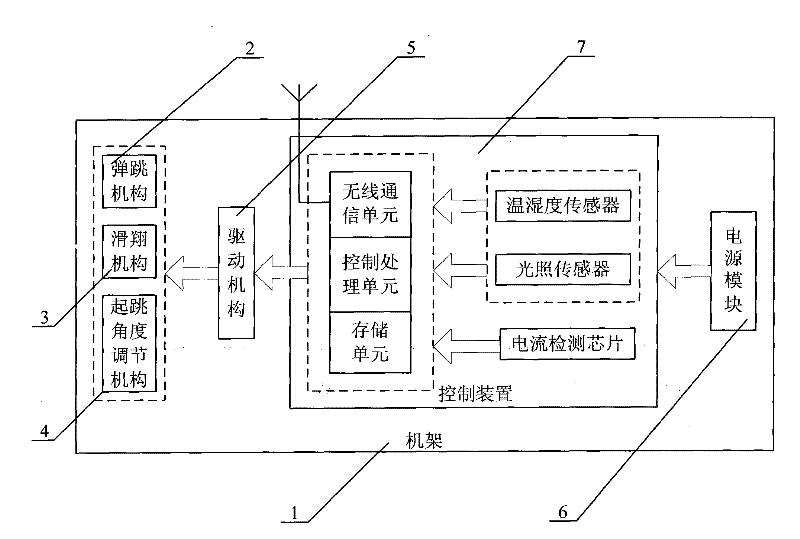
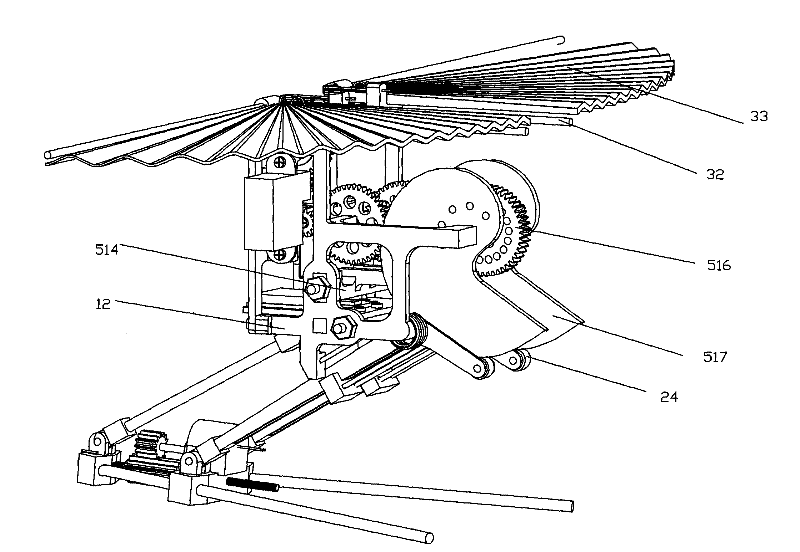
[0024] refer to figure 1 , figure 2 , image 3 , Figure 4 A gliding robot capable of jumping and taking off autonomously is composed of a frame 1, a bouncing mechanism 2, a gliding mechanism 3, a take-off angle adjustment mechanism 4, a driving mechanism 5, a power supply device 6 and a control device 7, and is characterized in that: It is used to install and fix other mechanisms and devices; the bouncing mechanism completes the robot’s standing and bouncing functions; the gliding mechanism completes the robot’s gliding function; the take-off angle adjustment mechanism completes the take-off angle adjustment function; The three parts of the driving device provide the driving force for the robot's jumping, gliding, and adjustment of the take-off angle; the power supply device provides all the en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More