

Driving anti-slip control system of shaft-driven electric vehicle and control method thereof
A vehicle drive and control system technology, applied in the direction of brakes, etc., can solve the problem of lack of coordinated control of motor drive torque and braking torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
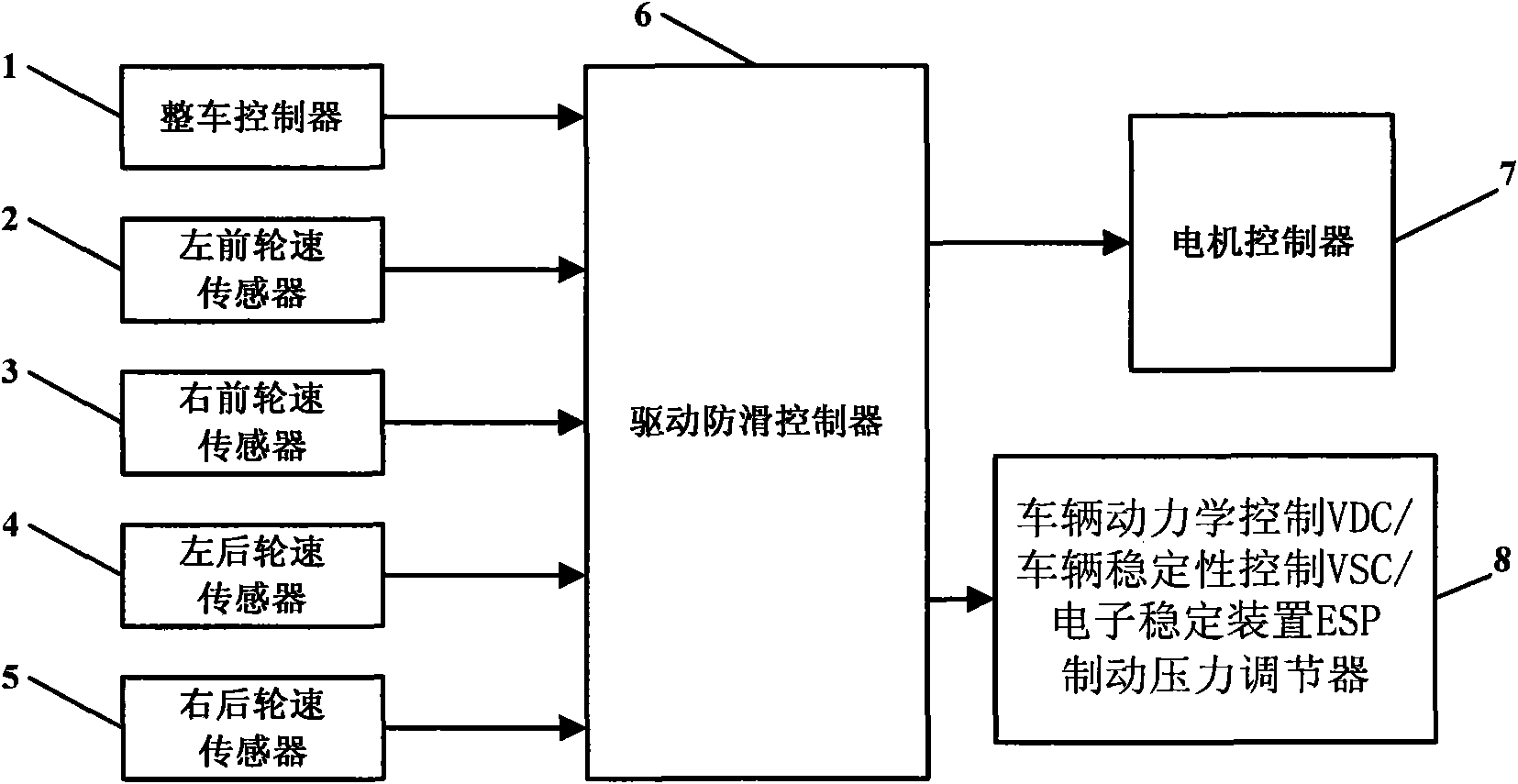
[0066] Such as figure 2 As shown, the drive anti-skid control system of the present invention includes a vehicle controller 1, a left front wheel speed sensor 2, a right front wheel speed sensor 3, a left rear wheel speed sensor 4 and a right rear wheel speed sensor 5, and a drive anti-skid controller 6 , a motor controller 7 and a vehicle dynamics control VDC / vehicle stability control VSC / electronic stability device ESP brake pressure regulator 8.
[0067] The drive anti-skid controller 6 is provided with five input ends: the motor torque target value input end, the motor torque target value Tm_tgt is input from the vehicle controller 1, and the four wheel speed signal input ends are respectively obtained from the four wheel speed sensors 2, 3, 4, 5 input the corresponding wheel speed signal, and there are two output terminals: the output terminal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More