

Biped walking bionic robot
A bionic robot and foot technology, applied in the field of robotics, can solve the problems of inflexible robot activities, limited use occasions, and many degrees of freedom, and achieve the effects of reducing control complexity, controlling turning angles, and accurate turning angles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
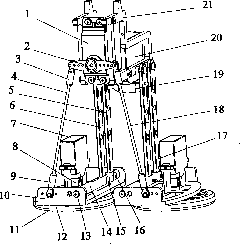
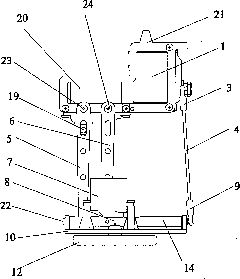
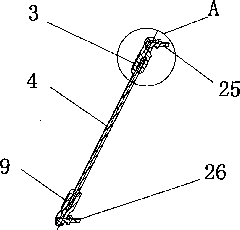
[0040] Figure 1 to Figure 7 Shows the specific structural schematic diagram of this embodiment, such as figure 1 As shown, the biped bionic robot includes a fuselage, two connecting rod mechanisms, two foot mechanisms and a control device. The body is connected with the two foot mechanisms, and the two foot mechanisms are respectively the left foot mechanism and The right foot mechanism, the left foot mechanism and the right foot mechanism are juxtaposed on the left and right sides of the bottom of the fuselage. The two connecting rod mechanisms are respectively a left connecting rod mechanism 18 and a right connecting rod mechanism. The left connecting rod mechanism 18 connects the fuselage and the left foot respectively. The internal mechanism, the right connecting rod mechanism respectively connects the fuselage and the right foot mechanism, such as Figure 5 As shown, the right foot mechanism is located on the right side below the fuselage, including a leg strut, a turni...
Embodiment 2
[0057] This embodiment has the same structure as Embodiment 1 except for the following features: the control device includes a lithium battery, an embedded control board, an infrared sensor, an ultrasonic sensor, a speaker and a microphone, and the embedded control board is fixed on the support frame 21. Above, the lithium battery is located below the embedded control board and above the stepping steering gear 20, the infrared sensor is fixed on the front end of the footboard, and the ultrasonic sensor is fixed on the front end of the fuselage; the lithium battery and the embedded control board pass through the circuit Connection, the infrared sensor and the ultrasonic sensor are all connected with the embedded control board, and the embedded control board is respectively connected with the turning steering gear 7 of the swing steering gear 1, the stepping steering gear 20, the left foot mechanism and the right foot mechanism. Both the horn and the microphone are connected to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More