

Method for adjusting three-roll mill roll gap controller
An adjustment method and technology of three-roll mill, applied in the direction of rolling force/roll gap control, control/adjustment system, self-adaptive control, etc., can solve the problem that the precision of the finished product frame has a great influence, the fluctuation of the compensation value will be very large, and the steel pipe The wall thickness fluctuates greatly and other problems, so as to solve the problem of uneven force, increase the yield and uniform wall thickness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
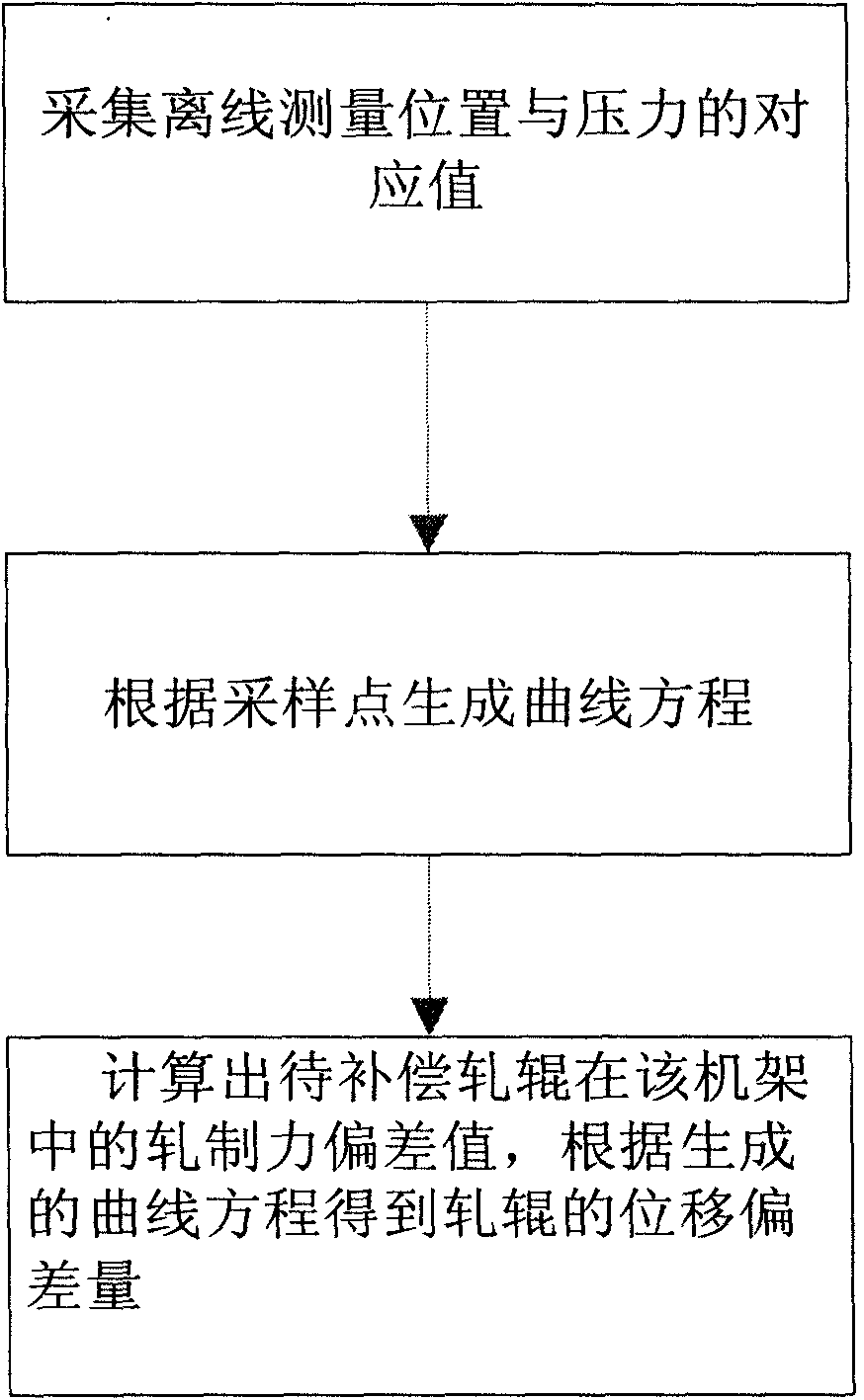
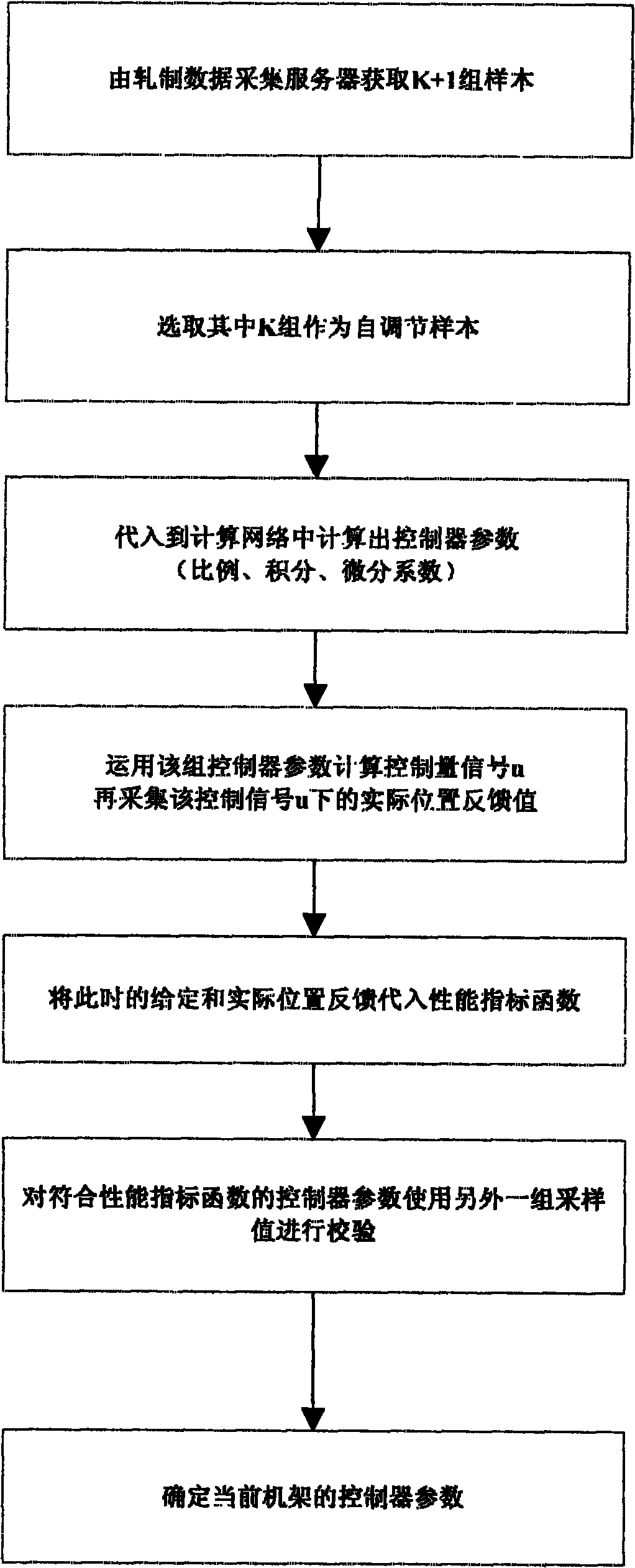
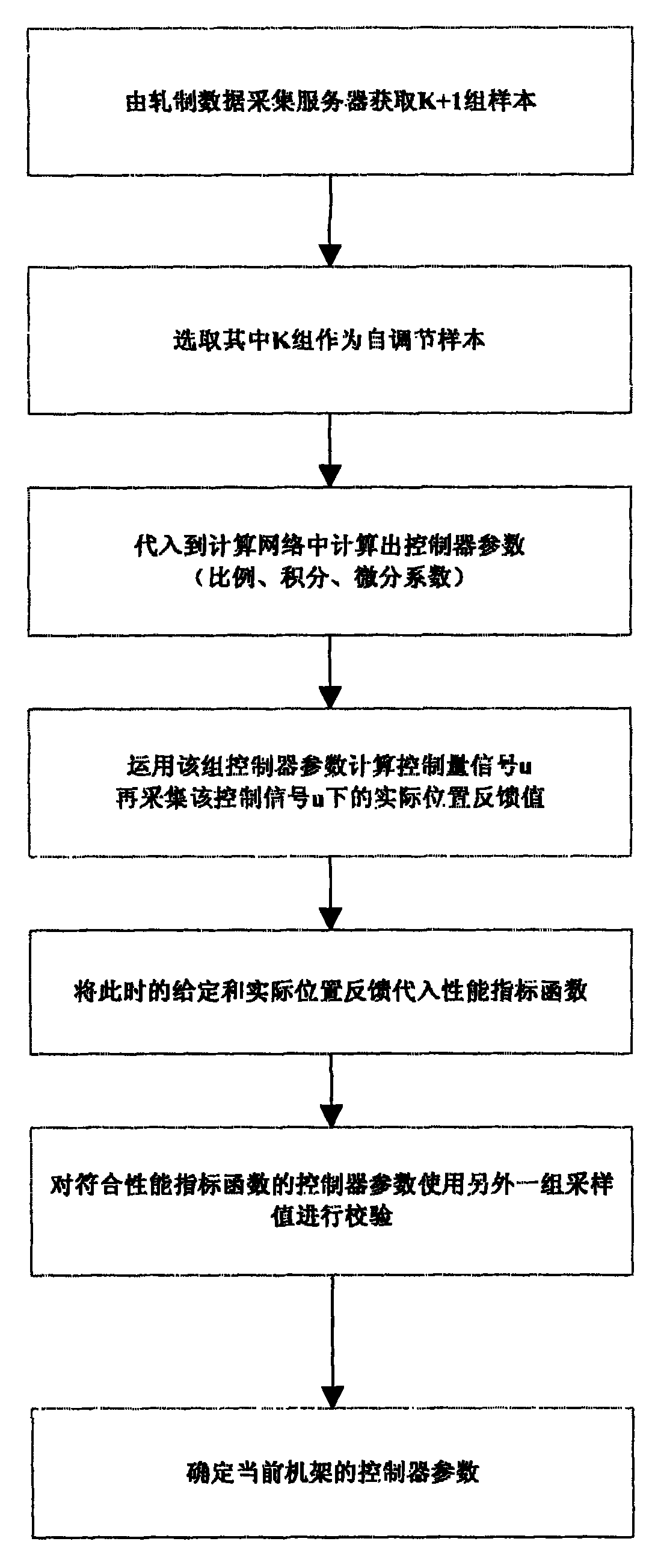
[0037] The present invention is described in detail below in conjunction with accompanying drawing and embodiment:
[0038] Such as figure 1 , figure 2 Shown:
[0039] The present invention adopts a dual insurance implementation mode of deriving controller parameters with the idea of neural network, and then applying incremental control equations to the controller. PID (Proportion Integration Differentiation) control to achieve a better control effect, it is necessary to adjust the three control functions of proportional kp, integral ki and differential kd to form a relationship of mutual cooperation and mutual restraint in the control quantity. It must be a simple "linear combination", and the best relationship can be found from the infinitely changing nonlinear combination. The arbitrary nonlinear expression ability of neural network can realize the PID control with the best combination through the learning of system performance. By adopting BP (Back Propagation) neur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More