

Depth map fusion method and device
A fusion method and technology of fusion device, which are applied in image enhancement, image data processing, instruments, etc., can solve the problems of incompleteness between viewpoints, inability to solve the problem of a large amount of depth information noise, inability to solve the problems of deep fusion, etc. Effects of noise and incomplete information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
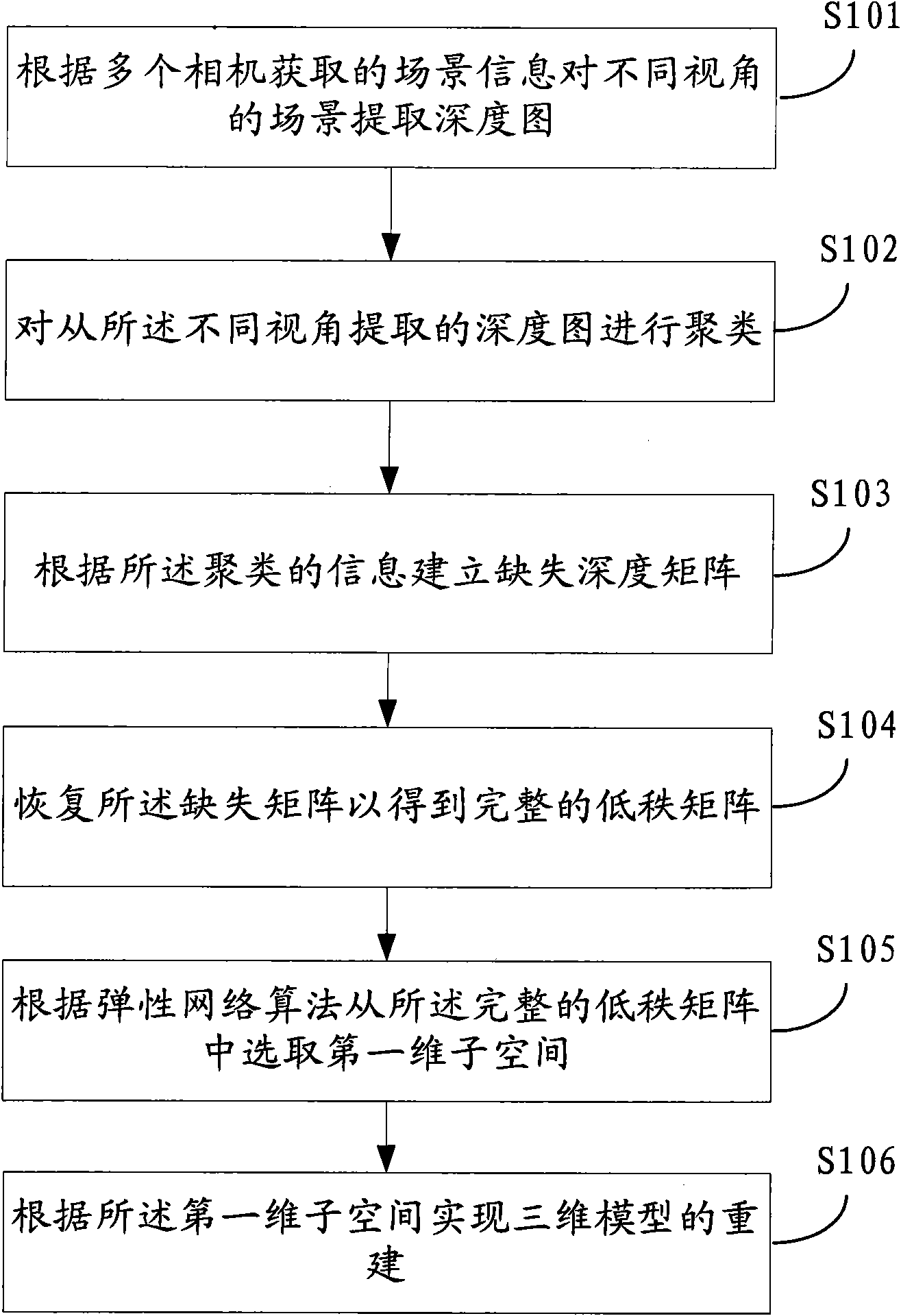
[0038] The present invention is aimed at the incompleteness between existing viewpoints, that is, a single camera cannot perceive the overall three-dimensional model under an object, and the existing computer algorithm cannot solve the noise problem in a large number of depth confidences, that is, the computer vision algorithm extracts Depth information is noisy, and none of the existing depth image fusion algorithms can solve the depth fusion in the presence of a large amount of noise, and a method of depth image fusion is proposed.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More