

PID (Proportional Integral Derivative) control method for elastic integral BP neural network based on RBF (Radial Basis Function) identification
A BP neural network and network technology, which is applied in the field of PID control system of elastic integral BP neural network, can solve the problems of difficult online real-time adjustment, weak robustness, and difficulty in adapting to changes in the external environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
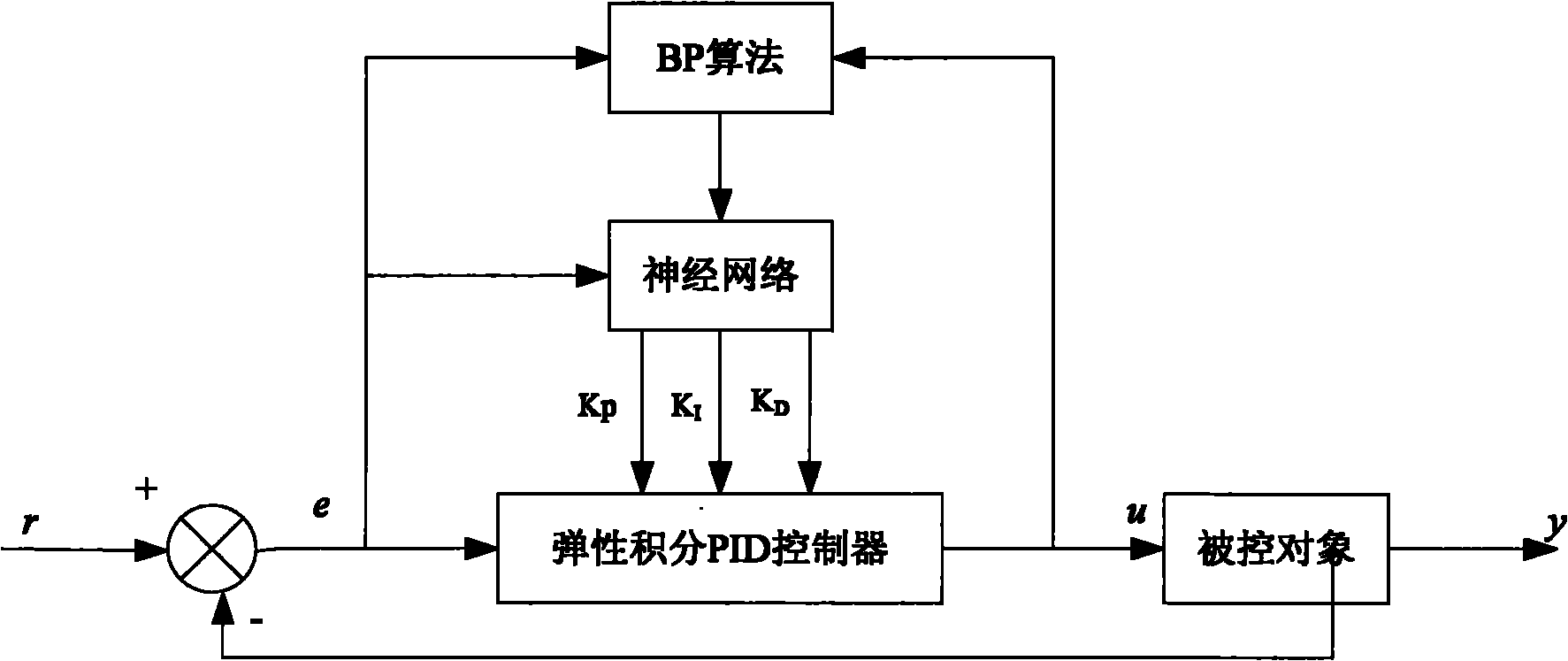
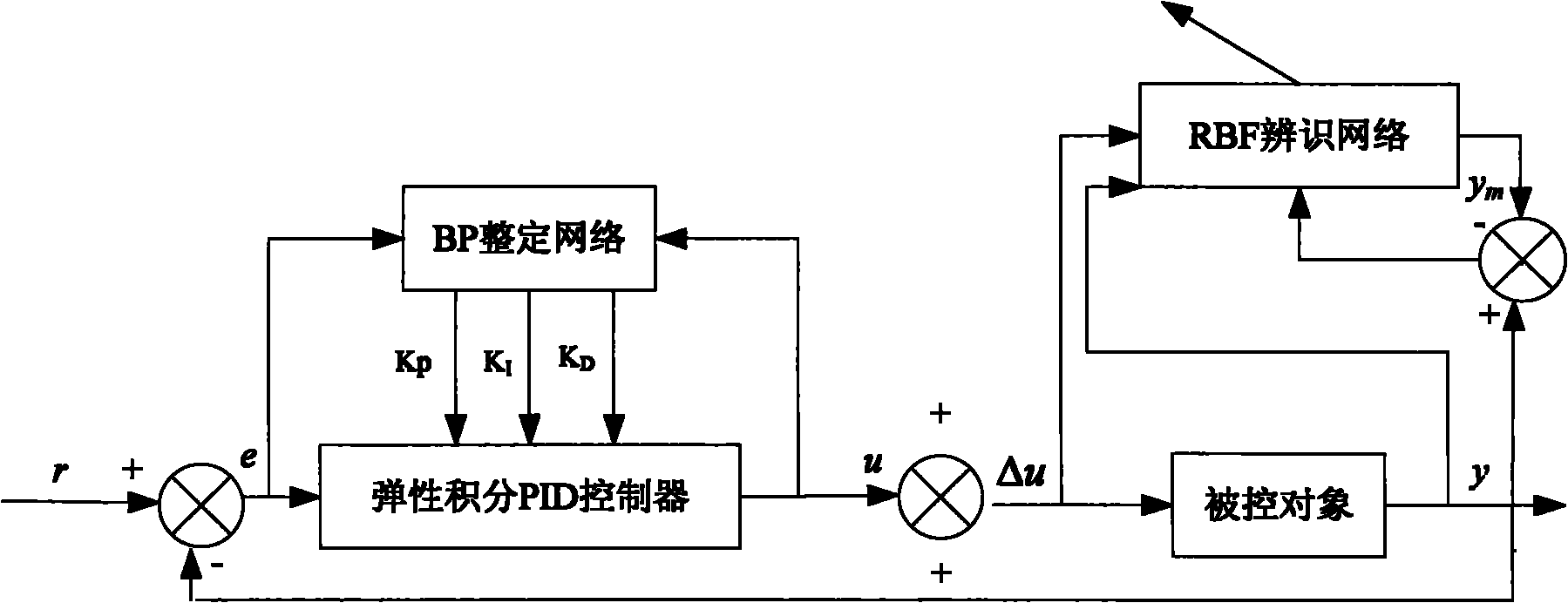
[0053] A PID control method based on elastic integral BP neural network identified by RBF (see figure 1 , figure 2 ), the method includes the following steps:
[0054] (1) Determine the structure of the BP network, and give the initial value of the weighting coefficient of each layer and Select learning rate η and inertia coefficient α, k=1;
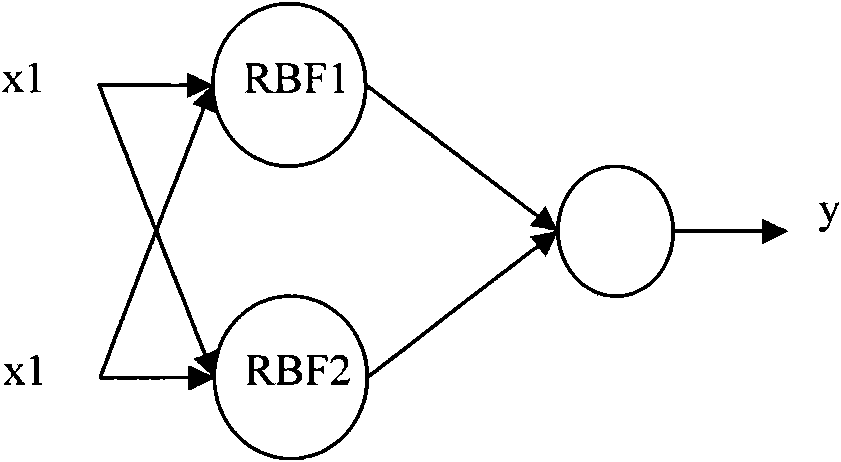
[0055] (2) Determine the input nodes and the number m of the RBF identification network, the number s of hidden layer nodes, and give the center vector C of the hidden layer nodes j (0), the initial value b of the base broadband parameter j (0), the initial value of the weight coefficient w j (0), learning rate ρ, inertia coefficient γ, k=1;
[0056] (3) Sampling to get y(k), r(k), and calculate e(k);
[0057] (4) Forward calculation of the input and output of neurons in each layer of the BP network, the output of the BP output layer is the three adjustable parameters of the PID control; the deviation threshold ε is given, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More