

Motion planning-based adaptive control method for bridge crane
A technology of adaptive control and motion planning, applied in the directions of transportation and packaging, load hoisting components, etc., can solve the problem of limited controller function realization and practicality, lack of adaptability to unknown parameters, and no automatic control system for overhead cranes has been developed. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
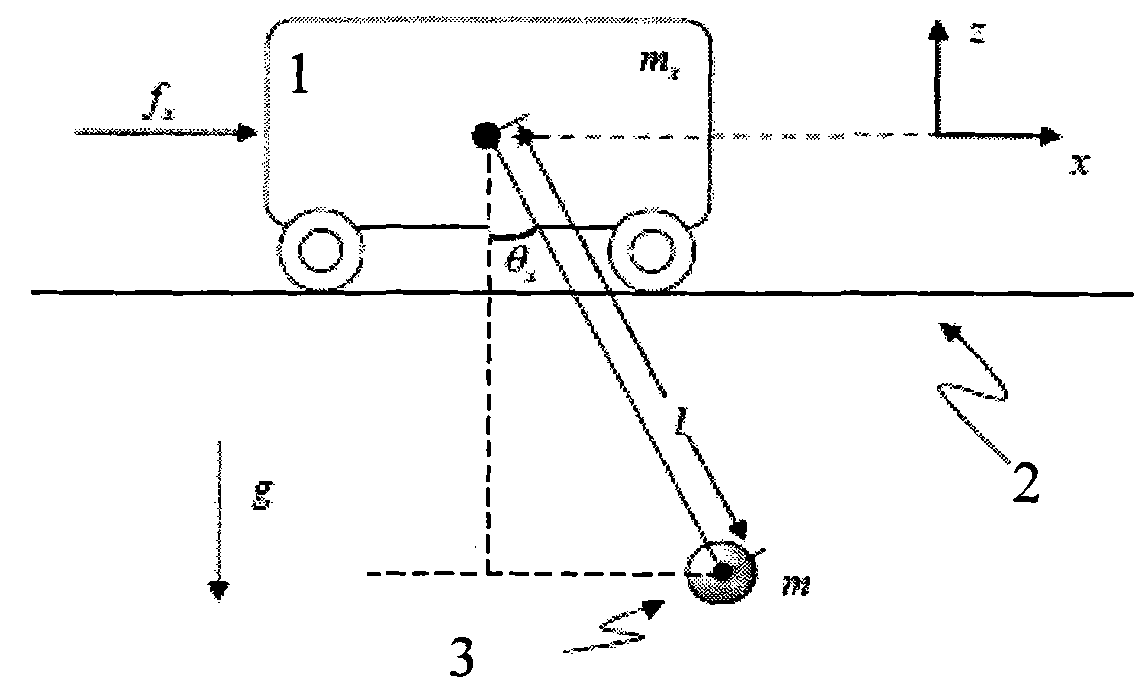
[0102] First, develop a sports plan
[0103] The purpose is to design an expected movement position time curve for the trolley. If the trolley moves along it, the trolley can reach the target position relatively quickly, and the load swing angle is also within a small acceptable range. For this reason, the present invention designs the trolley displacement time curve as a one-way smooth S-shaped curve, that is:
[0104] x d ( t ) = p d 2 + k v 2 4 k a ln ( cosh ( 2 k a t / k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More