

Apparatus and method for controlling robot arm, robot, program for controlling robot arm, and integrated electronic circuit
A robot arm and control device technology, applied in the direction of program control manipulator, manipulator, program control, etc., can solve problems such as inability to perform accurate correction, inability to perform motion correction smoothly, and inability to perform motion correction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
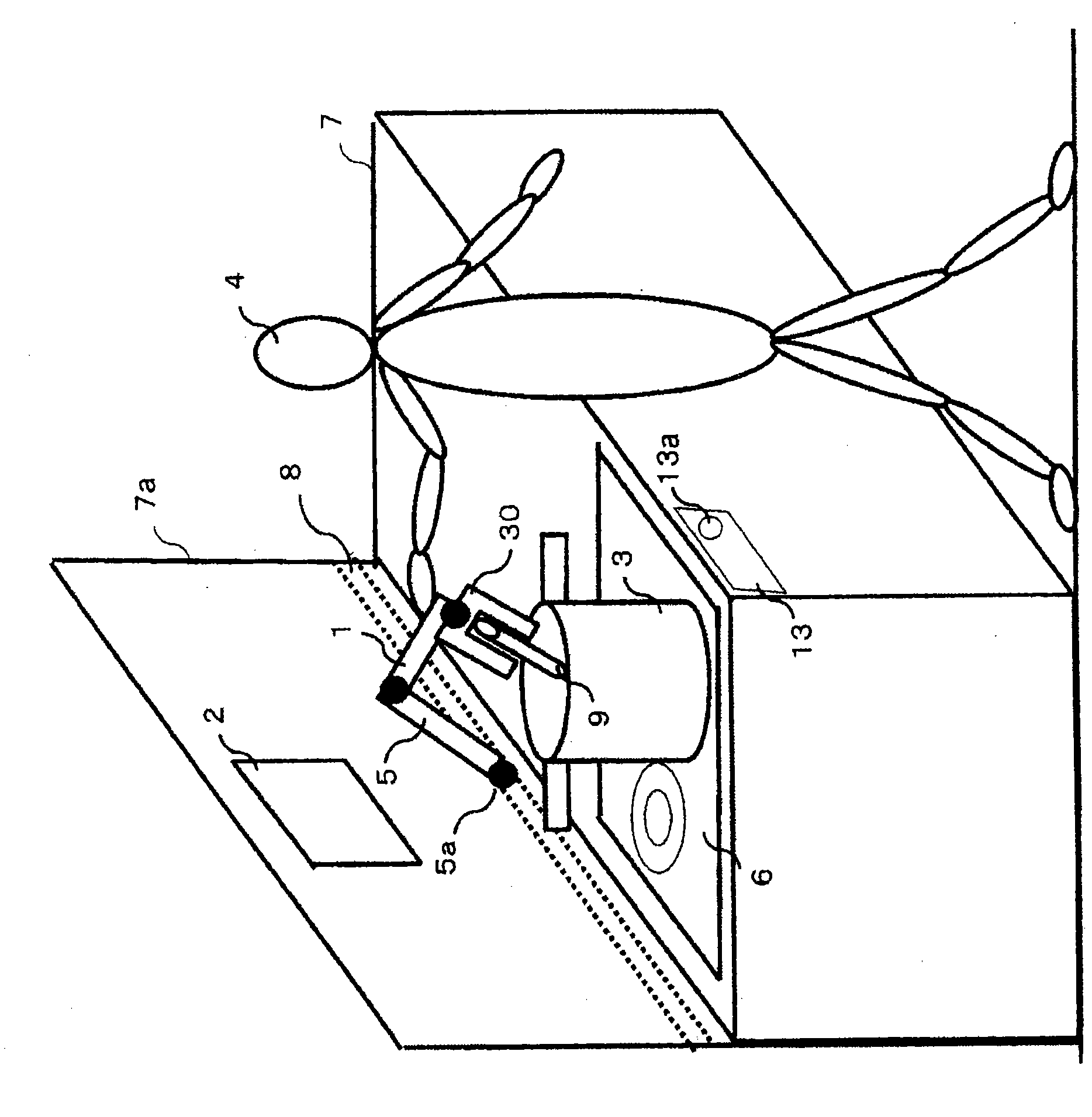
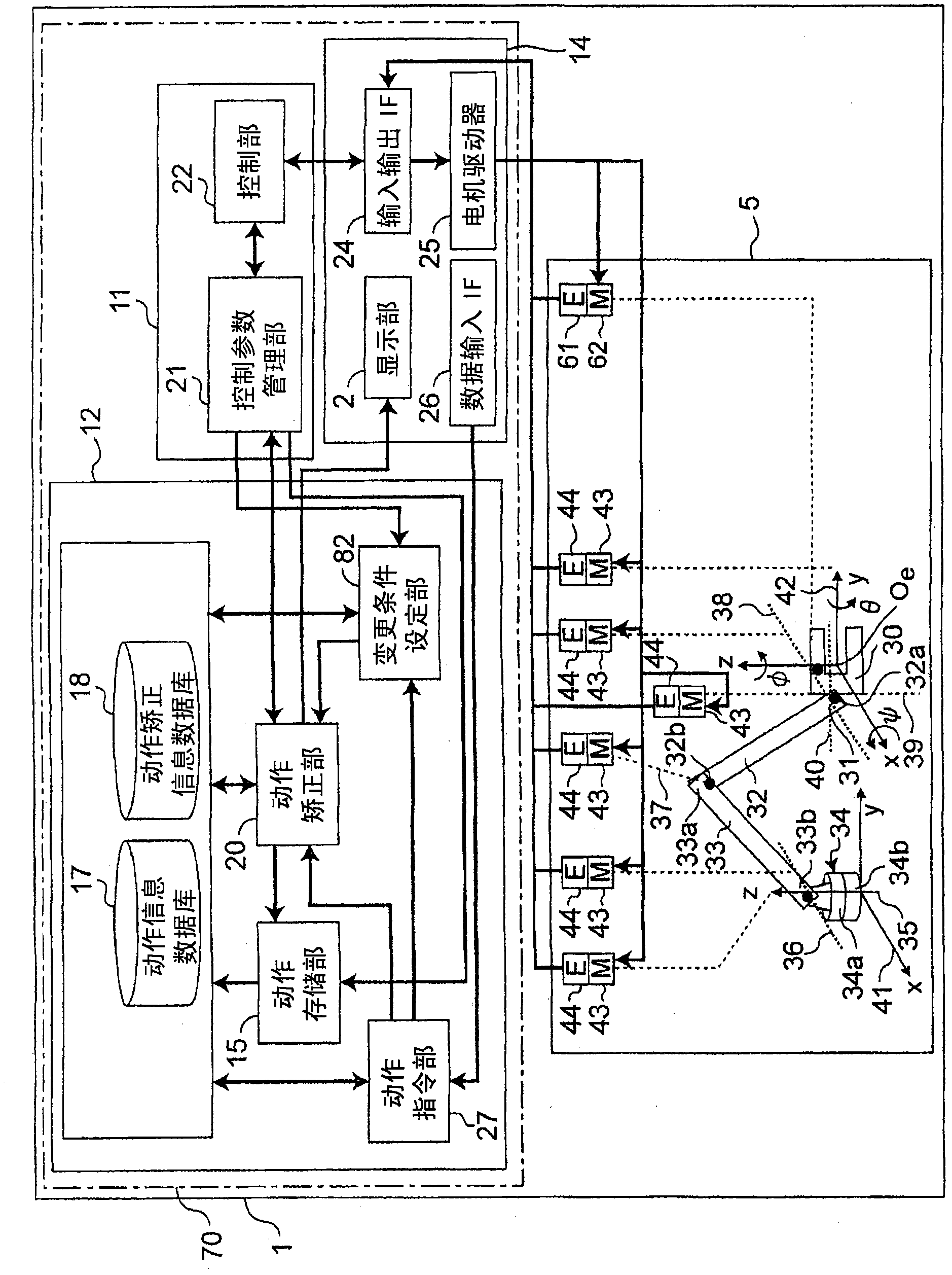
[0215] First, the structure of the robot system 1 provided with the control device of the robot arm in the first embodiment of the present invention will be described. figure 1 and figure 2 It is a schematic diagram showing the robot system 1 including the robot arm 5 and its control device 70 in the first embodiment of the present invention.
[0216] Such as figure 1 As shown, the robot arm 5 of the robot system 1 is, for example, installed on a wall 7a of a workbench 7 such as a kitchen or a desk at home, and the base end 5a of the robot arm 5 is supported in a movable manner relative to a guide rail 8 fixed on the wall 7a. , through the force exerted by the person 4, the robot arm 5 can be moved along the lateral direction (for example, the horizontal direction) on the guide rail 8 .
[0217] The robot system 1 cooperates with the robot arm 5 and the human 4 to perform tasks in the home, such as stirring the ingredients in the pot 3 with the robot arm 5 or wiping off the...
no. 2 approach
[0392] The basic configuration of the control device for the robot arm in the second embodiment of the present invention is the same as that in the first embodiment, so the description of the common parts will be omitted, and only the different parts will be described in detail below.
[0393] As in the case of the first embodiment, if Figure 8A As shown, the case where the robot system 1 is used to perform the stirring operation of the pot 3 is taken as an example for description.
[0394] —Action Correction Information Database—
[0395] Figure 16 A movement correction information database 18 is shown. It is configured to have a motion correction information ID number as an ID for identifying the motion correction information (refer to Figure 16 "Motion correction information ID" column); it is the information involved in the correction interval (refer to Figure 16 "Correction interval" column) and is the information related to the threshold value of the force when t...
no. 3 approach
[0401] The basic configuration of the control device for the robot arm in the third embodiment of the present invention is the same as that in the first embodiment, so the description of the common parts will be omitted, and only the different parts will be described in detail below.
[0402] As in the case of the first embodiment, if Figure 8A As shown, the case where the robot system 1 is used to perform the stirring operation of the pot 3 is taken as an example for description.
[0403] —Action Correction Information Database—
[0404] Figure 18 A movement correction information database 18 is shown. It is configured to have a motion correction information ID number as an ID for identifying the motion correction information (refer to Figure 18 "Motion correction information ID" column); it is the information involved in the correction interval (refer to Figure 18 "Correction interval" column) and is the information related to the threshold value of the force when th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More