

Intelligent robot welding device using large-scale workpiece
A technology for intelligent robots and welding robots, applied in the field of robots, can solve the problems of lack of flexibility and adaptability of robots, and achieve the effect of simplified motion control and high-precision motion control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
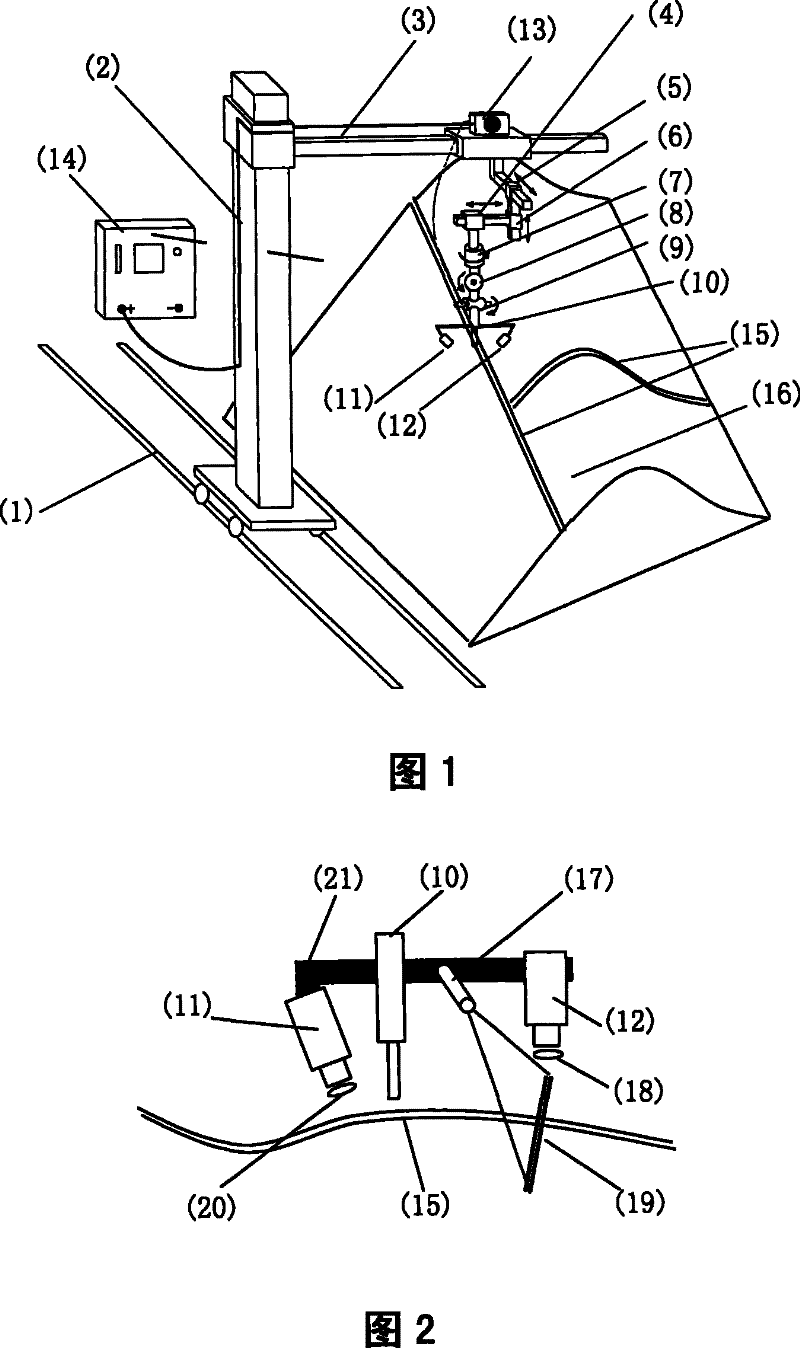
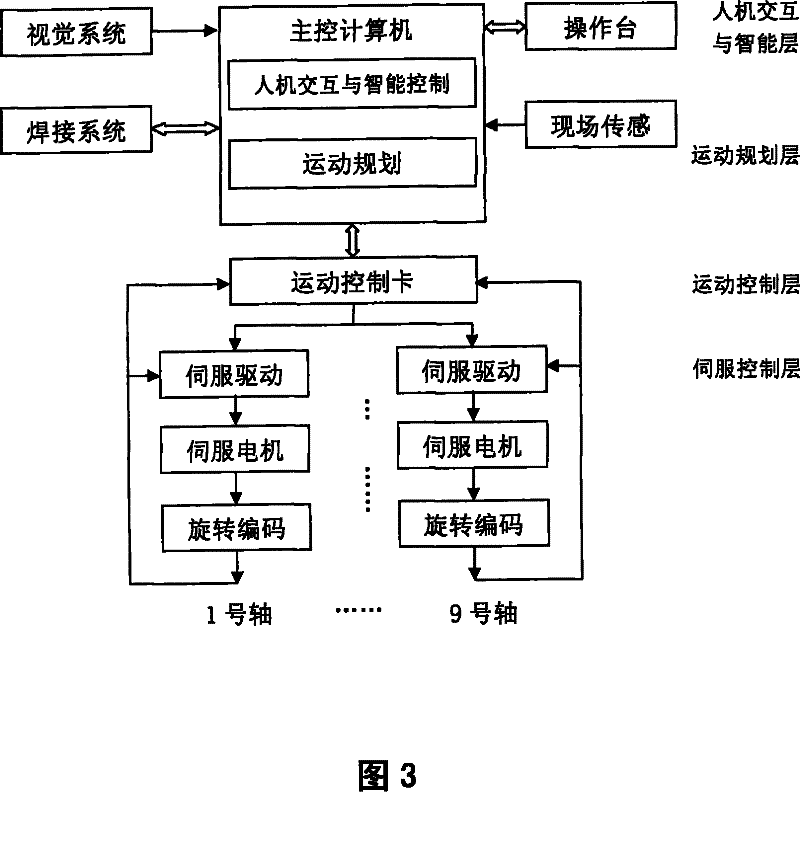
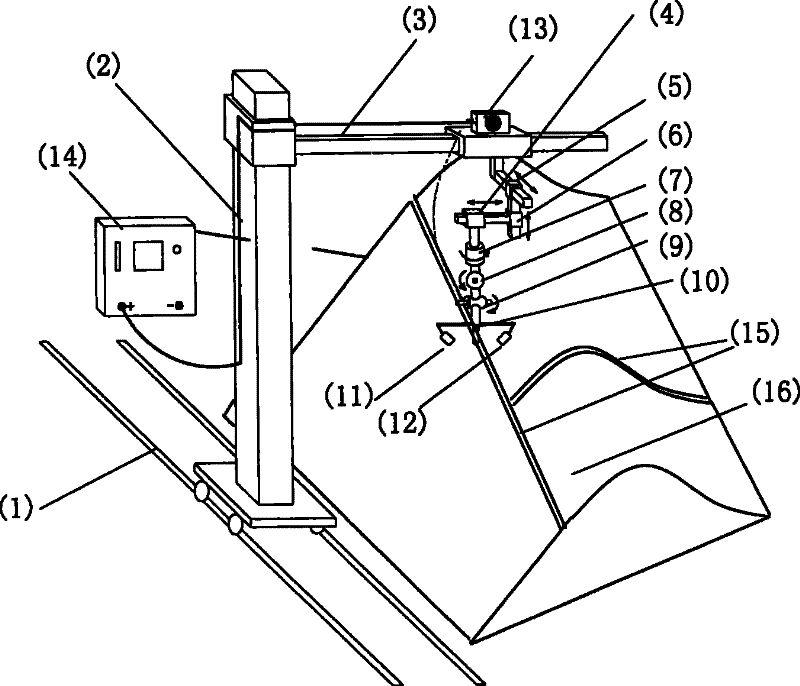
[0023] The large-scale workpiece welding intelligent robot device of the present invention adopts the combination of six rectangular coordinate translation joints and three rotation joints to provide translation and rotation degrees of freedom required for the operation of the welding torch at the end of the robot. Six translation joints constitute two sets of three-coordinate translation mechanisms for macro / micro motion, which are used to realize large-scale and high-precision position adjustment of the welding torch in Cartesian space. During the welding process, the laser structured light vision sensor is used to collect the welding seam image of the workpiece, and the position information is extracted; the near-infrared corresponding camera is used to collect the molten pool image to obtain the welding seam forming information. The controller takes the industrial control computer as the center, processes the visual information of the welding process, the sensor information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More