

Multi-robot formation method based on Ad-Hoc network and leader-follower algorithm
A multi-robot, robot technology, applied in the direction of instruments, position/direction control, non-electric variable control, etc., can solve problems such as easy loss of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
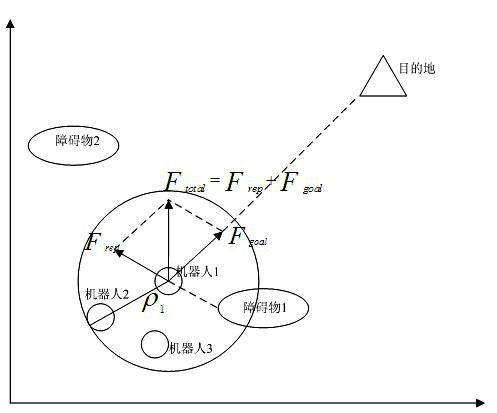
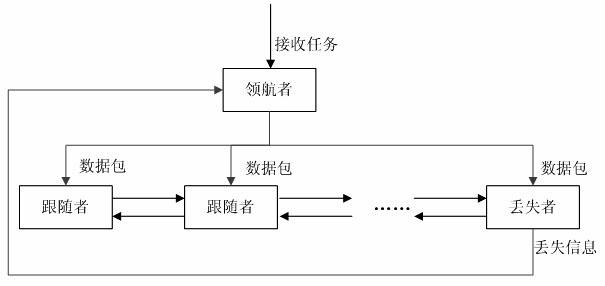
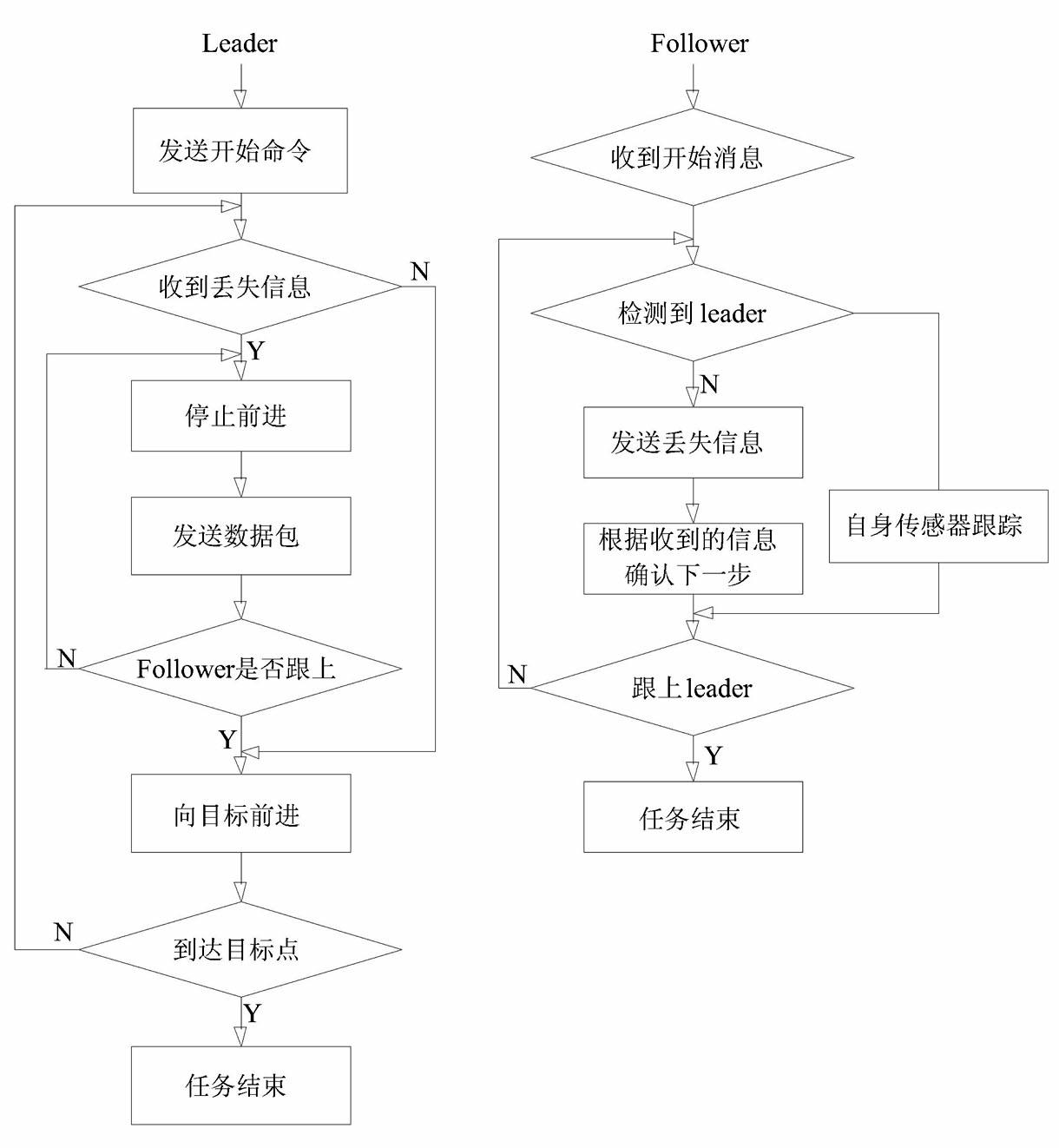
[0014] The leader-follower method is to divide the robots in the formation into two complementary roles leader and follower, one or several robots in the group are designated as the leader (leader), and the rest as it or their followers ( Followers), the basic idea of this method is that the followers track the position and direction of the leader at a certain distance to make it reach a preset value, so as to control the follower to track the trajectory of the leader to achieve formation control. In this way, the formation control algorithm can be analyzed and processed with the knowledge of control theory, and the tracking error can be stabilized. This method is simple to control. During the entire movement process, only the leader knows the task information, and the behavior of the entire robot group can be controlled only by giving its behavior or trajectory. The trajectory of the formation is completely determined by the leader; but the relationship between the leader an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More