

Tracking method and system of time-varying formation of unmanned aerial vehicles
A tracking system and UAV technology, applied in the field of UAV control, can solve the problems of UAV collision communication distance, overshoot, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
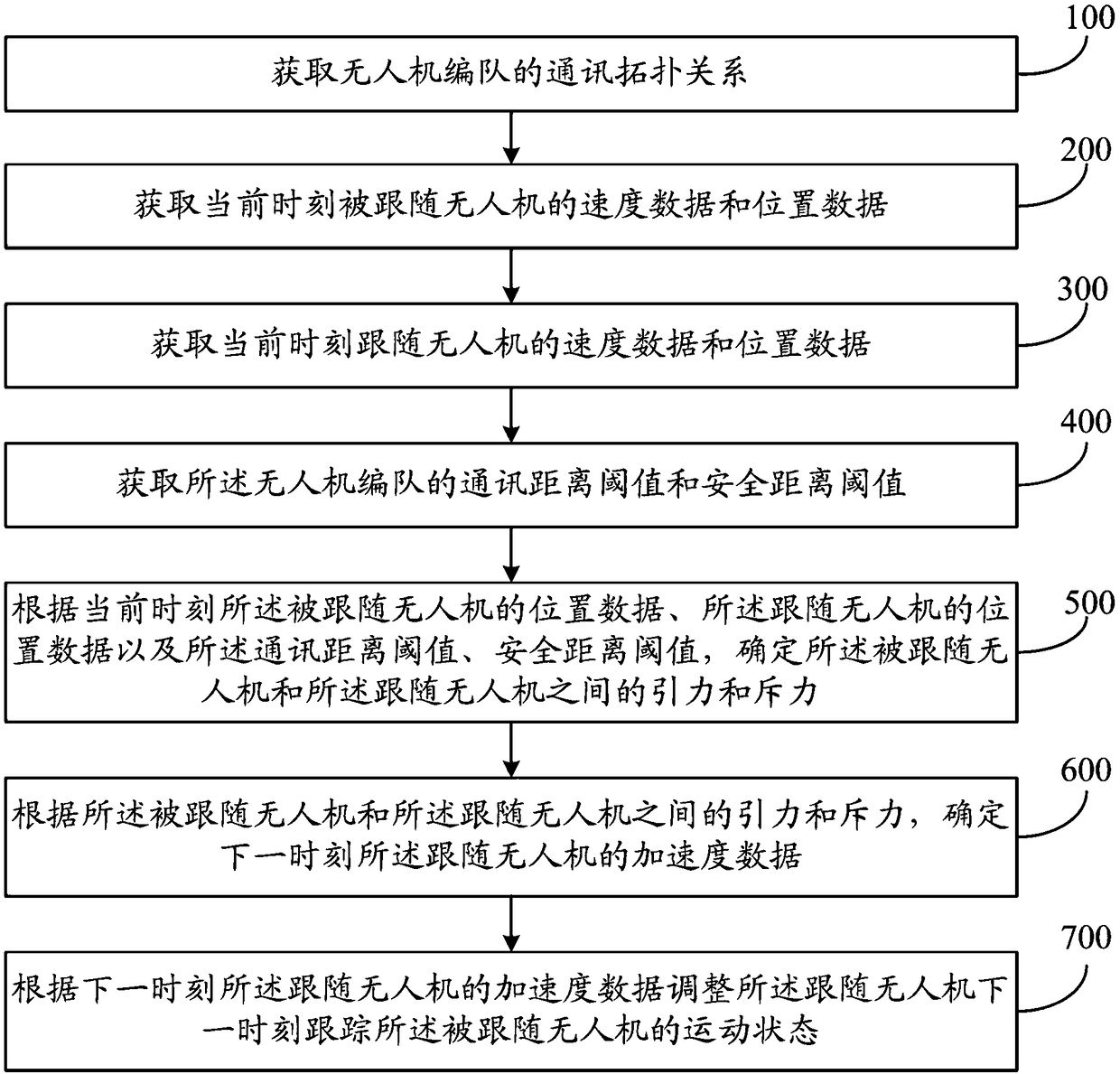
[0107] In this specific embodiment, 4 unmanned aerial vehicles form the unmanned aerial vehicle time-varying formation, image 3 It is a schematic flow chart of a specific embodiment of the present invention, Figure 4 It is a schematic diagram of communication topology relationship in a specific embodiment of the present invention. Such as Figure 4 As shown, UAV 4 is the leader UAV, and the remaining 3 UAVs are follower UAVs. During the tracking process, the tracking object of UAV 1 is UAV 4, the tracking object of UAV 2 is UAV 4, and the tracking object of UAV 3 is UAV 1. Therefore, UAV 1 As a follower UAV, the tracking UAV 4 realizes the formation, and when the UAV 1 acts as the followed UAV, it guides the UAV 3 to realize the formation.
[0108] according to Figure 4 As shown in the schematic diagram of the communication topology relationship, the system is simulated, and the simulation parameters are as follows: the system interference is δ 1 (t)=[0.2sin(0.2t),0.2c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More