

Dual-leg travelling mechanism with adjustable joint length
A walking mechanism and adjustable technology, applied in the field of mobile robots, can solve the problems of increasing design maintenance and control costs, reducing the movement flexibility of the mechanism, increasing the leg load of the mechanism, etc., and achieving good walking ability, large bearing capacity, and simple mechanism. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
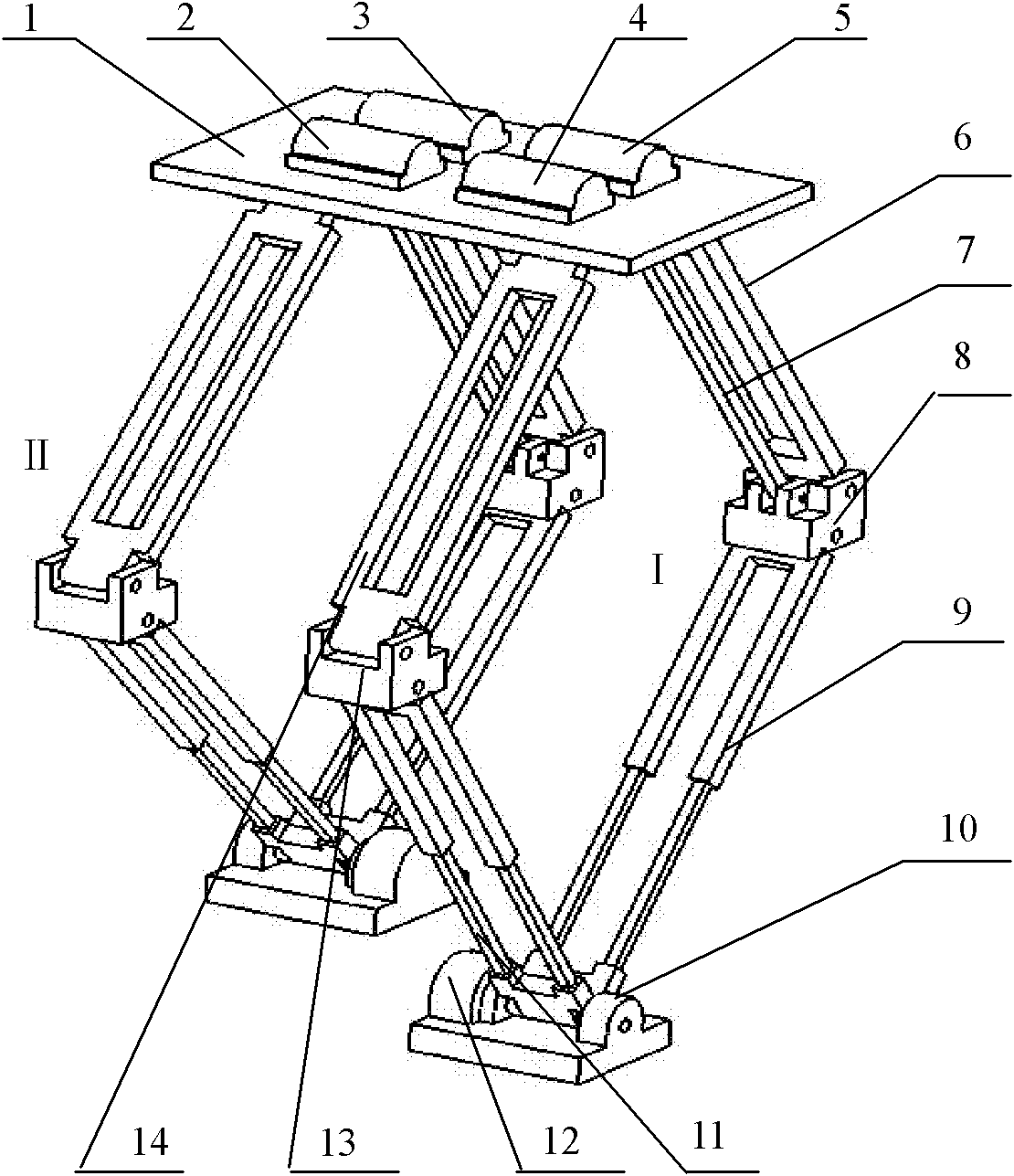
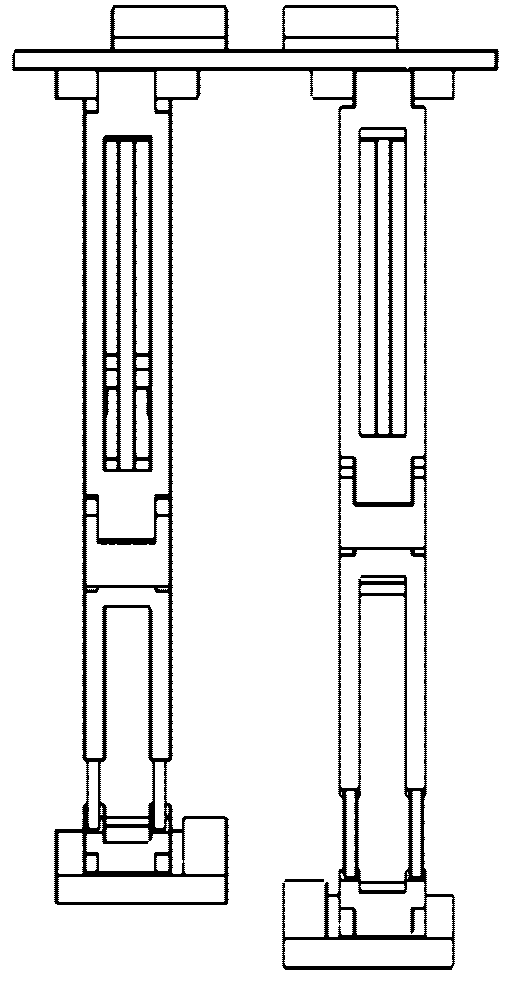
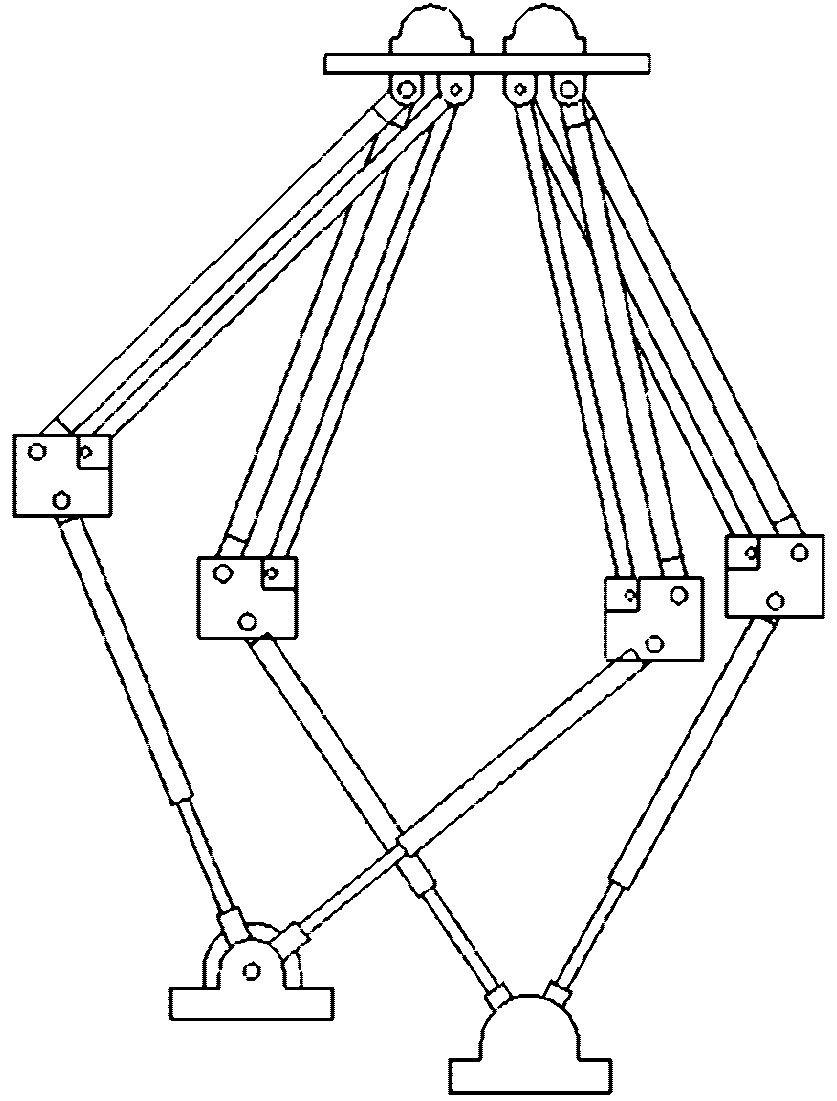
[0018] A dual-leg walking mechanism with adjustable joint length, which includes a platform (1), leg one (I), and leg two (II); leg one (I) and leg two (II) have the same structure and are closed loops Kinematic chain form; Leg one (1) is made of first motor (4), second motor (5), active arm one (6), auxiliary arm (7), first hinge (8), adjustable joint (9) , pin (10), the third motor (12), adjustable joint (11), the second hinge (13), active arm two (14); for leg one (1), by controlling the first motor (4) , the second motor (5) respectively drives the first active arm (6) and the second active arm (14) to rotate, thereby realizing the lifting and landing motion of the foot (10), and adjusting the foot by controlling the rotation of the third motor (12). The angle between the ground and the ground; by coordinating the control of the driving motors of leg one (I) and leg two (II), the squatting, standing up, walking, running and jumping motions of the walking mechanism can be r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More