

High-precision navigation method for landed or attached deep sky celestial body detector
A navigation method and detector technology, applied in the field of high-precision navigation, can solve the problems of inability to correct inertial navigation, navigation attitude, height and speed errors, and inability to meet high-precision landings, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be described in further detail below in conjunction with the accompanying drawings and implementation.
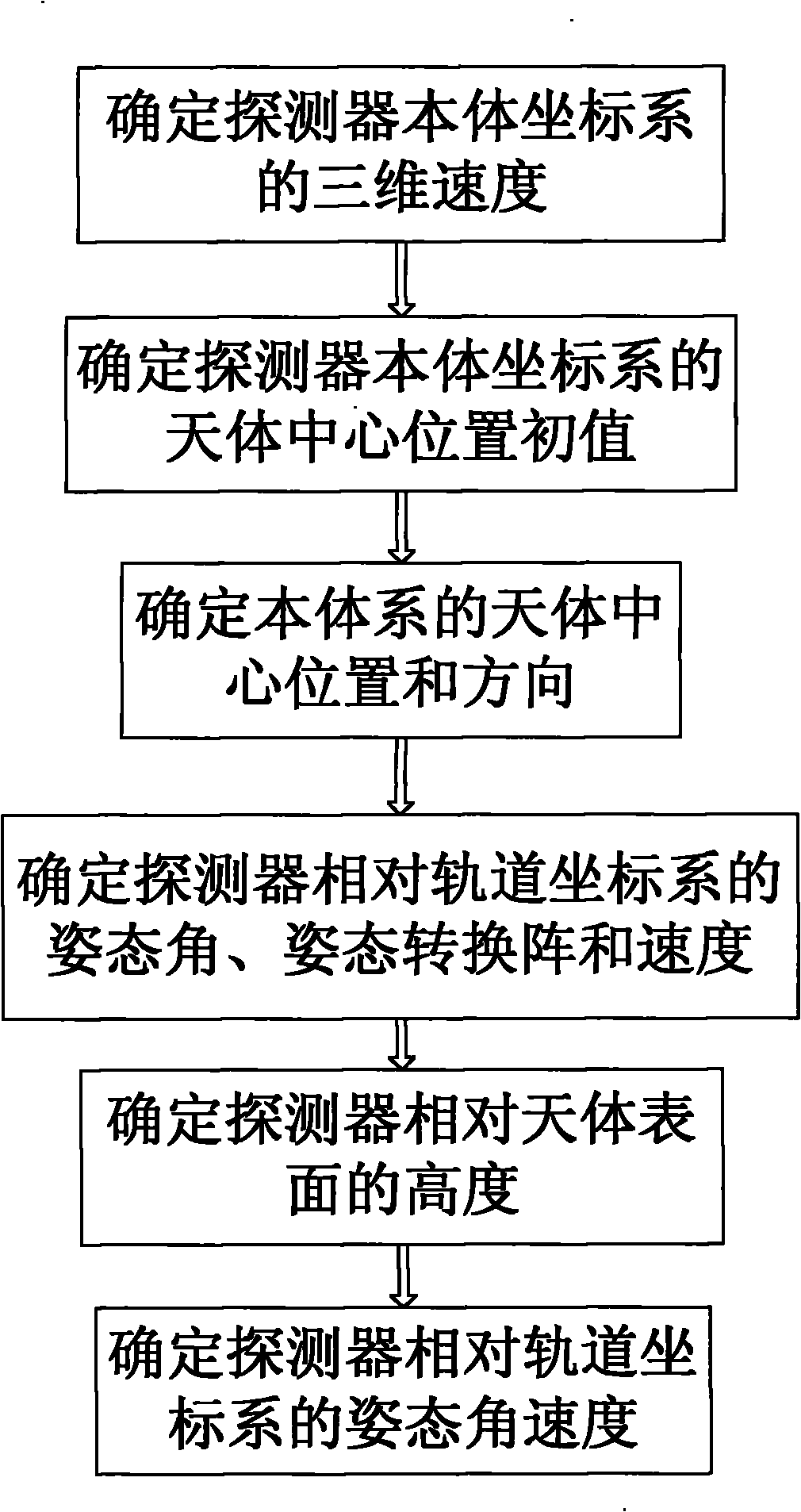
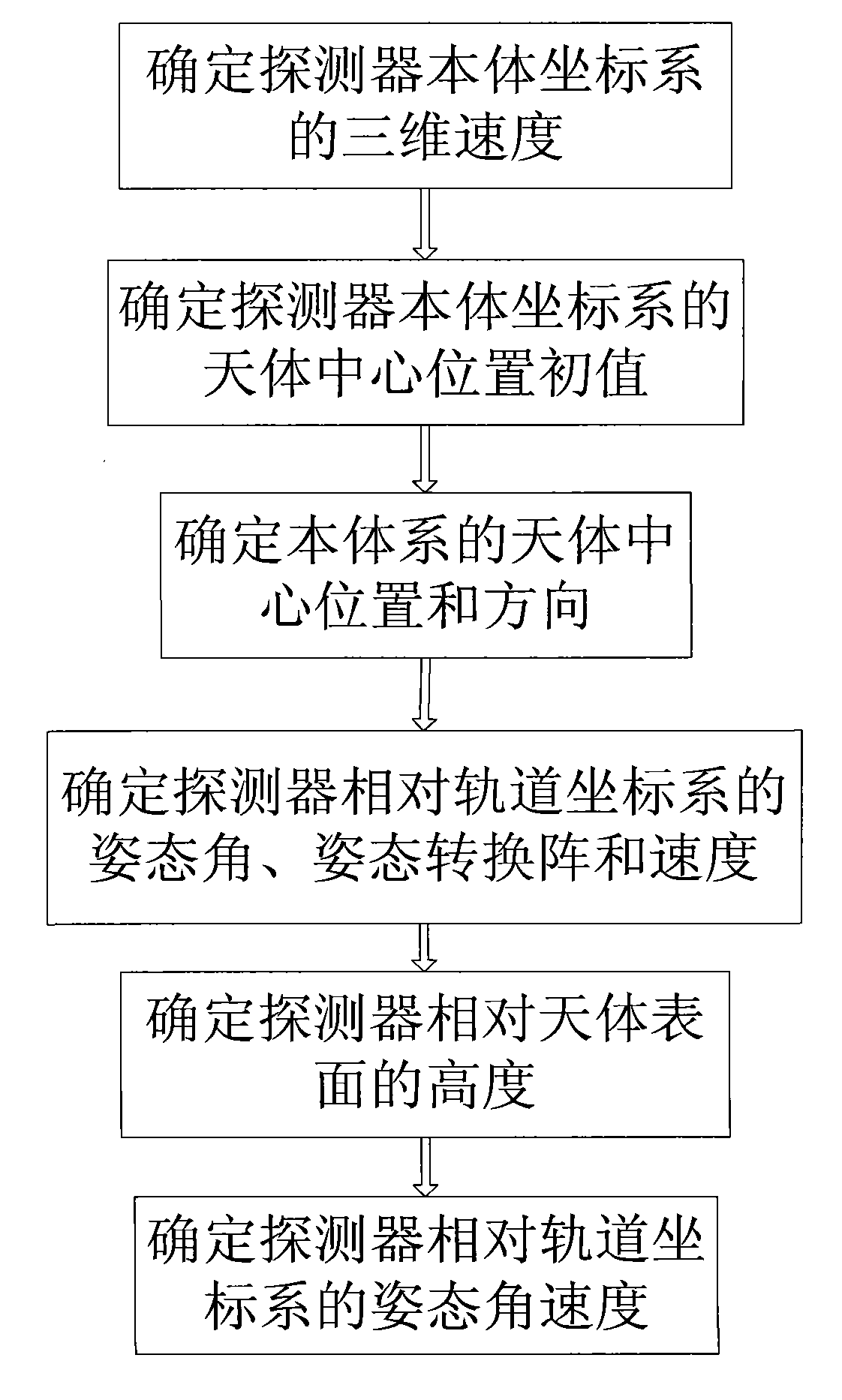
[0044] Such as figure 1 As shown, a high-precision navigation method for landing or attaching a deep-space celestial probe, it includes the following steps:
[0045] (1) Determine the three-dimensional velocity v of the detector body coordinate system b
[0046] Measure the velocity v of the three non-coplanar beams using the velocimeter on the detector 1 , v 2 , v 3 And the three beams of the speedometer are installed to point to l b1 , l b2 , l b3 , to determine the three-dimensional velocity of the detector body coordinate system
[0047] The body coordinate system is defined as: the origin is the center of mass of the detector, and the three axes point to the coordinate system of the main axis of inertia of the detector.
[0048] (2) Determine the initial value of the center position of the celestial body in the detector body...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More