

Recognition device and method for parameters of execution mechanism in electro-hydraulic linear velocity servo system
A technology for actuators and servo systems, applied in valve devices, valve operating/release devices, mechanical equipment, etc., can solve the problem of blind adjustment of electronic controller control parameters, difficulty in line speed servo performance meeting engineering requirements, electro-hydraulic line speed Servo system debugging is time-consuming and labor-intensive, so as to save energy and time, good static performance and dynamic performance, and overcome blindness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] In order to deepen the understanding of the present invention, the specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings. The embodiments are only used to explain the present invention, and do not constitute a limitation to the protection scope of the present invention.
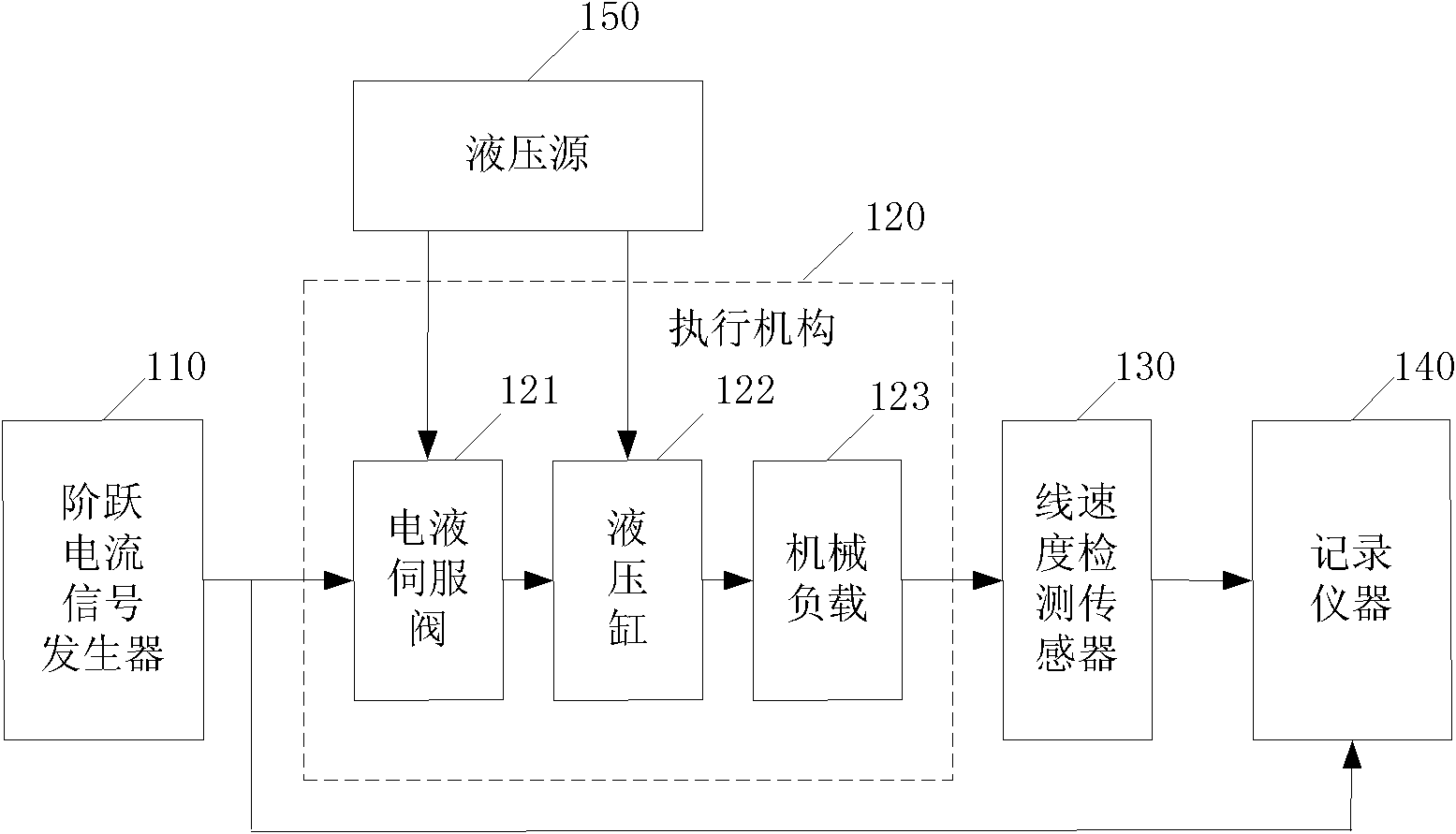
[0032] Such as figure 1 Shown is a block diagram of the actuator parameter identification device in the electro-hydraulic linear velocity servo system according to the embodiment of the present invention. The actuator parameter identification device in the electro-hydraulic linear velocity servo system of the embodiment of the present invention consists of a step current signal generator 110, an electro-hydraulic servo valve 121, a hydraulic cylinder 122, a mechanical load 123, and a linear velocity A detection sensor 130, a recording instrument 140, and a hydraulic source 150 constitute, wherein the step current signal gen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More