

Stepping angle compensation method for stepping motor
A technology of stepping motor and compensation method, which is applied in the direction of motor generator control, electrical components, control system, etc., and can solve the problems of uneven micro-step angle, inflexible control mode, and deviation of air gap magnetic field from expectations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0039] Step 1: Set the subdivision number and step angle of the subdivision driver:
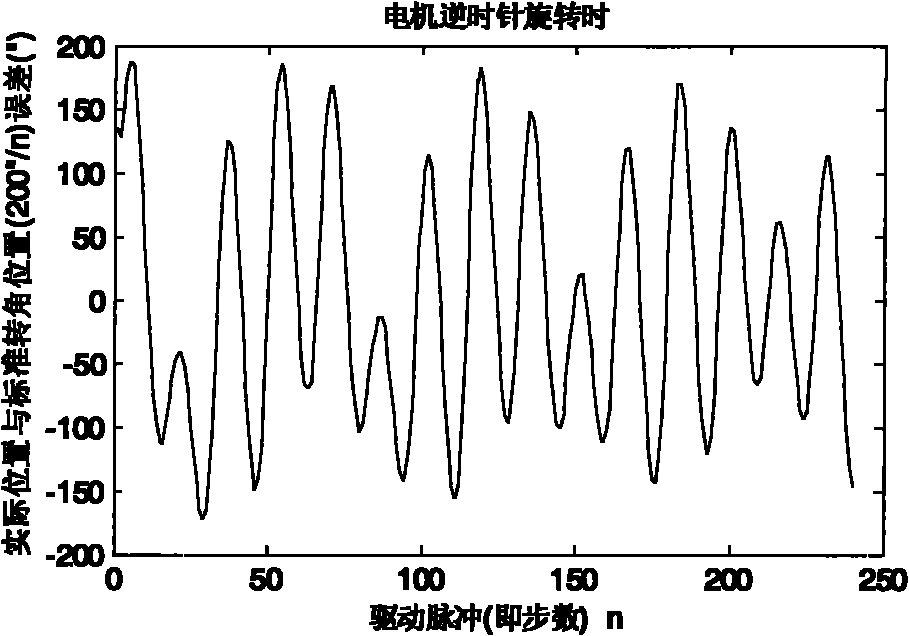
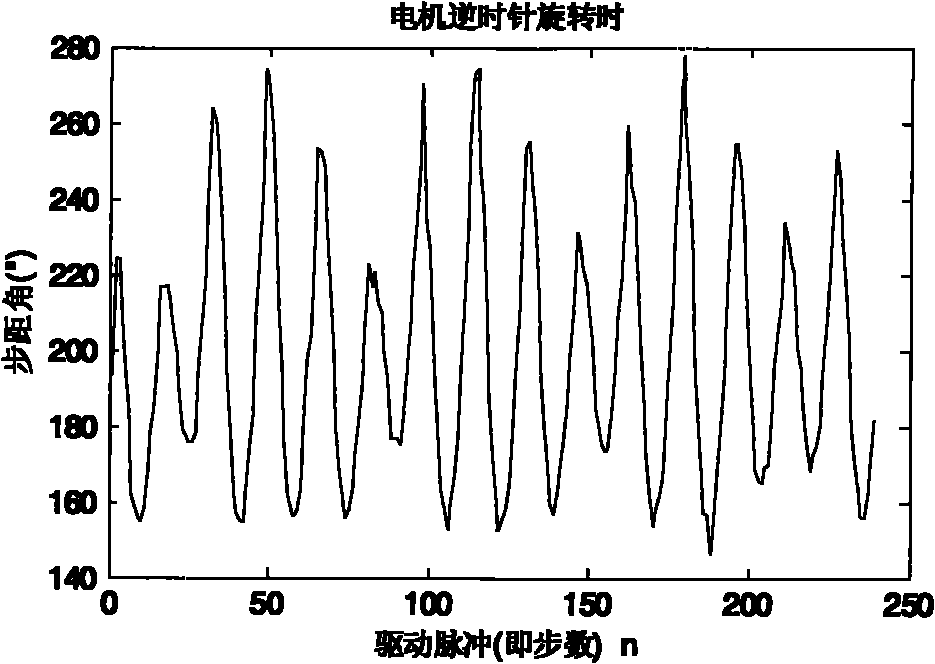
[0040] The present invention sets the step angle as 200" according to the subdivision number and the step angle formula, and each microstep is 2", and one step is essentially the result of accumulating 100 microsteps.
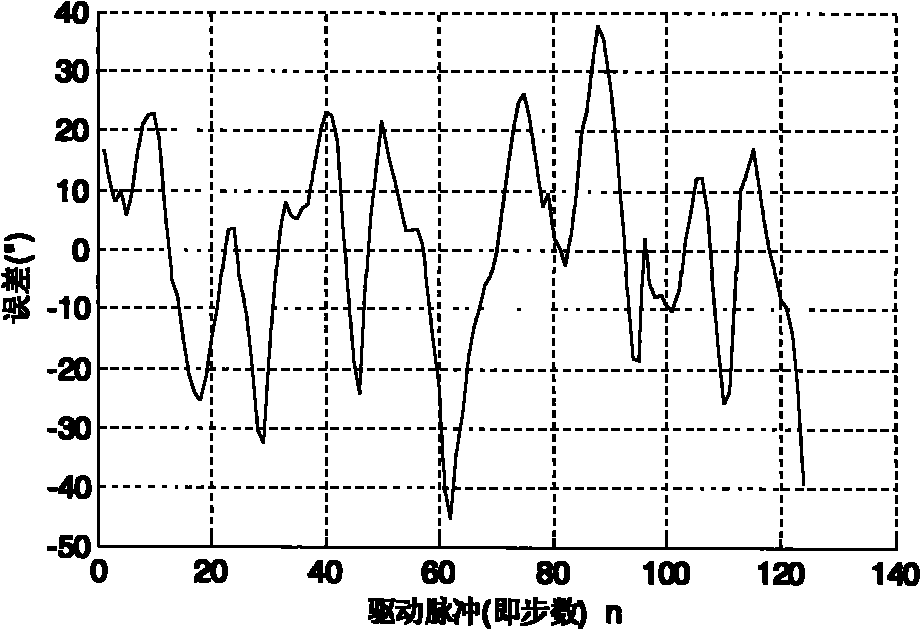
[0041] Step 2: Measure the position error δ with a measurement system that is an order of magnitude more accurate than the stepper motor step angle n : According to the measurement results, the step angle error error model δ(n) is established, and the subdivision compensation function is obtained, and the Fourier analysis is carried out on the relationship between the actual position and the ideal position deviation, and the obtained frequency spectrum is as follows image 3 As shown, there are mainly four peaks in the figure, and the corresponding frequencies are 2, 4, 6, and 8, that is, there are strong signals at these four frequencies, while there is no obvious signal info...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More