

Robot with wheel legs
A wheel-legged robot and thigh technology, applied in the field of robotics, can solve the problem of wheel-legged robots prone to slipping and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
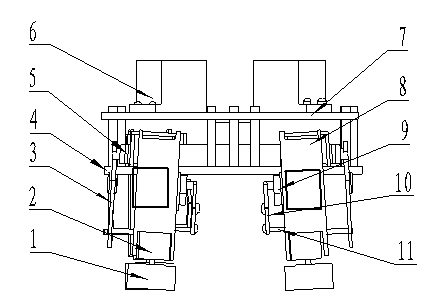
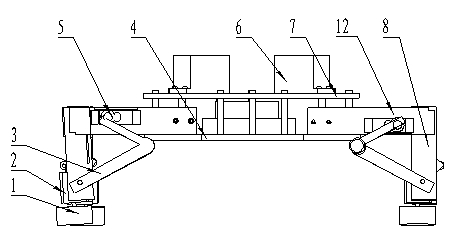
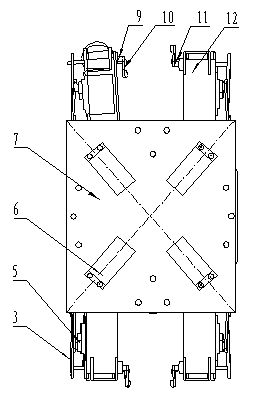
[0018] like Figure 1-6 As shown, a wheel-legged robot of the present invention includes a frame, and the frame includes a back plate 7 on the upper floor and an abdominal plate 4 on the lower floor, the back plate 7 is fixedly connected to the abdominal plate 4 through a connecting rod, and the Four legs with the same structure and dual-purpose functions of wheels and feet are provided, and each leg includes a thigh 12 which is rotatably arranged on the back plate 7 and a shank 8 which rotates radially around the thigh 12 . The thigh 12 is connected with a thigh driving device for driving the thigh 12 to rotate in the horizontal direction. The thigh driving device includes a thigh steering gear 6 fixed on the back plate 7 . The output shaft of the thigh steering gear 6 is fixedly connected to the thigh 12 . The shank 8 is connected with a shank driving device for driving the shank 8 to swing back and forth. The shank driving device includes a shank steering gear 5 fixed on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More