Pushing mechanism for minimally invasive surgical robot
A technology of interventional surgery and propulsion mechanism, which is applied in the field of minimally invasive vascular interventional surgery robot propulsion mechanism, which can solve the problems such as the reduction of catheter movement precision, and achieve the effect of simple structure, convenient use and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
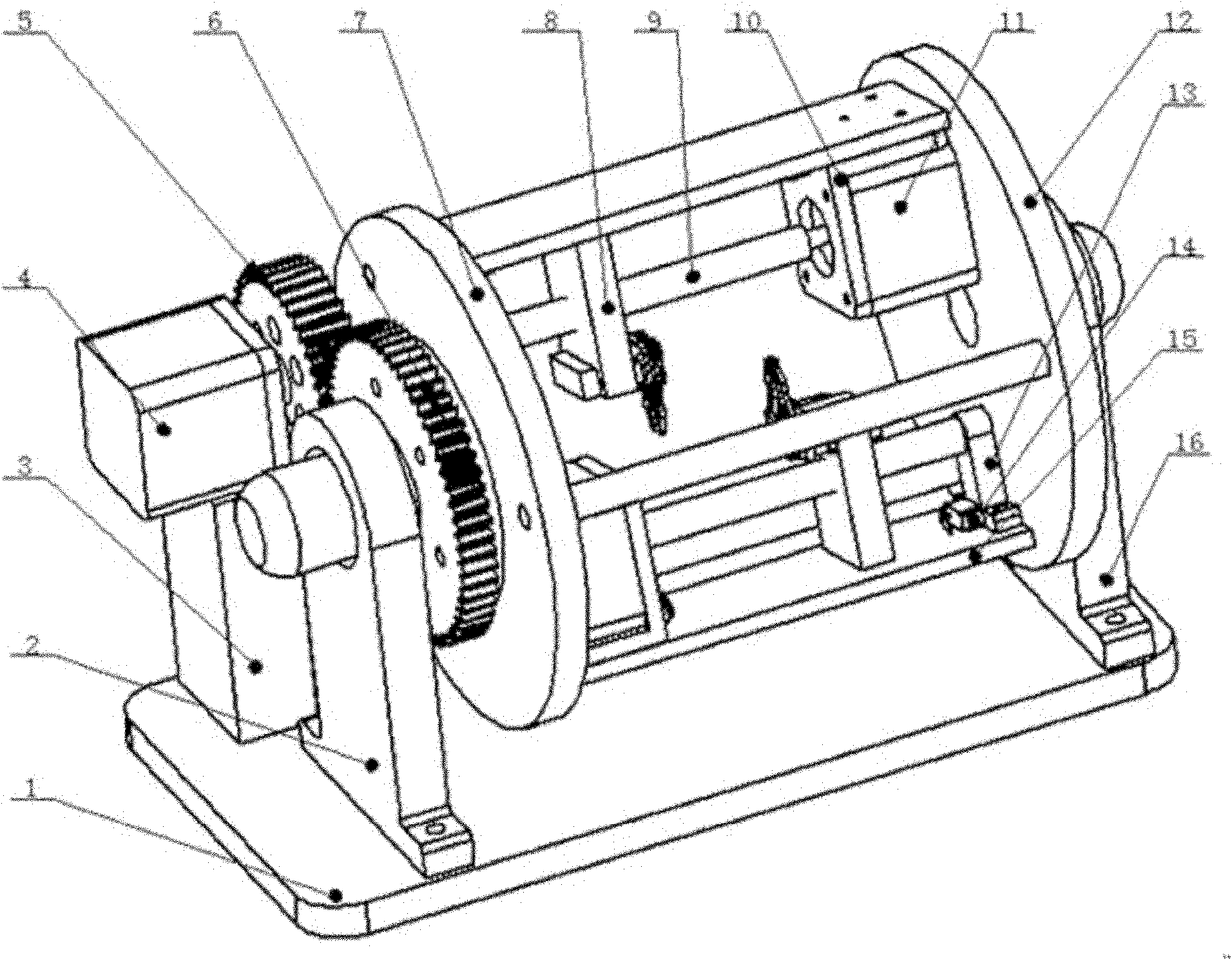
[0019] The propulsion mechanism of the minimally invasive vascular interventional surgery robot of the present invention is used for the end effector of the minimally invasive vascular interventional surgery robot, and its preferred specific implementation mode is:
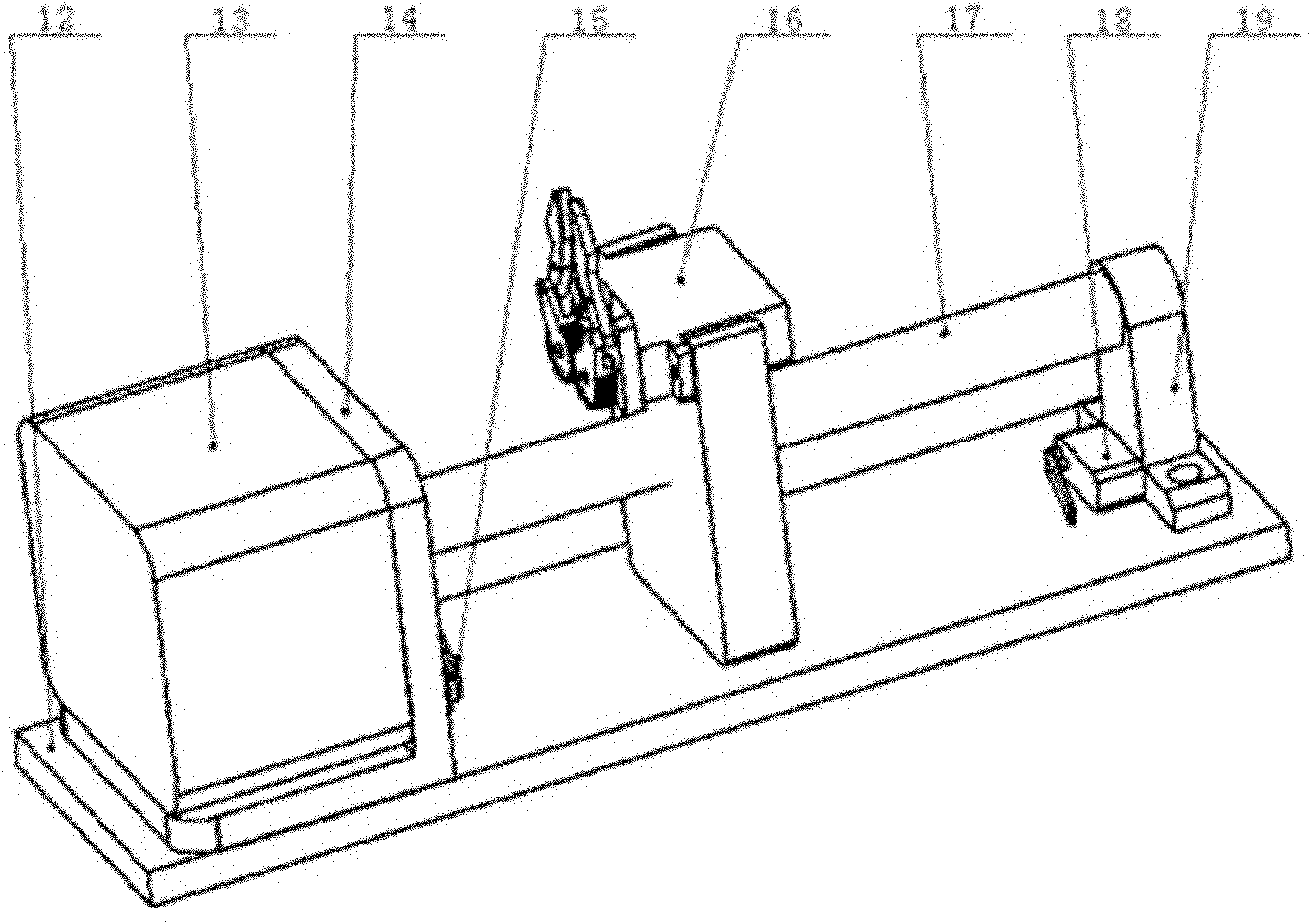
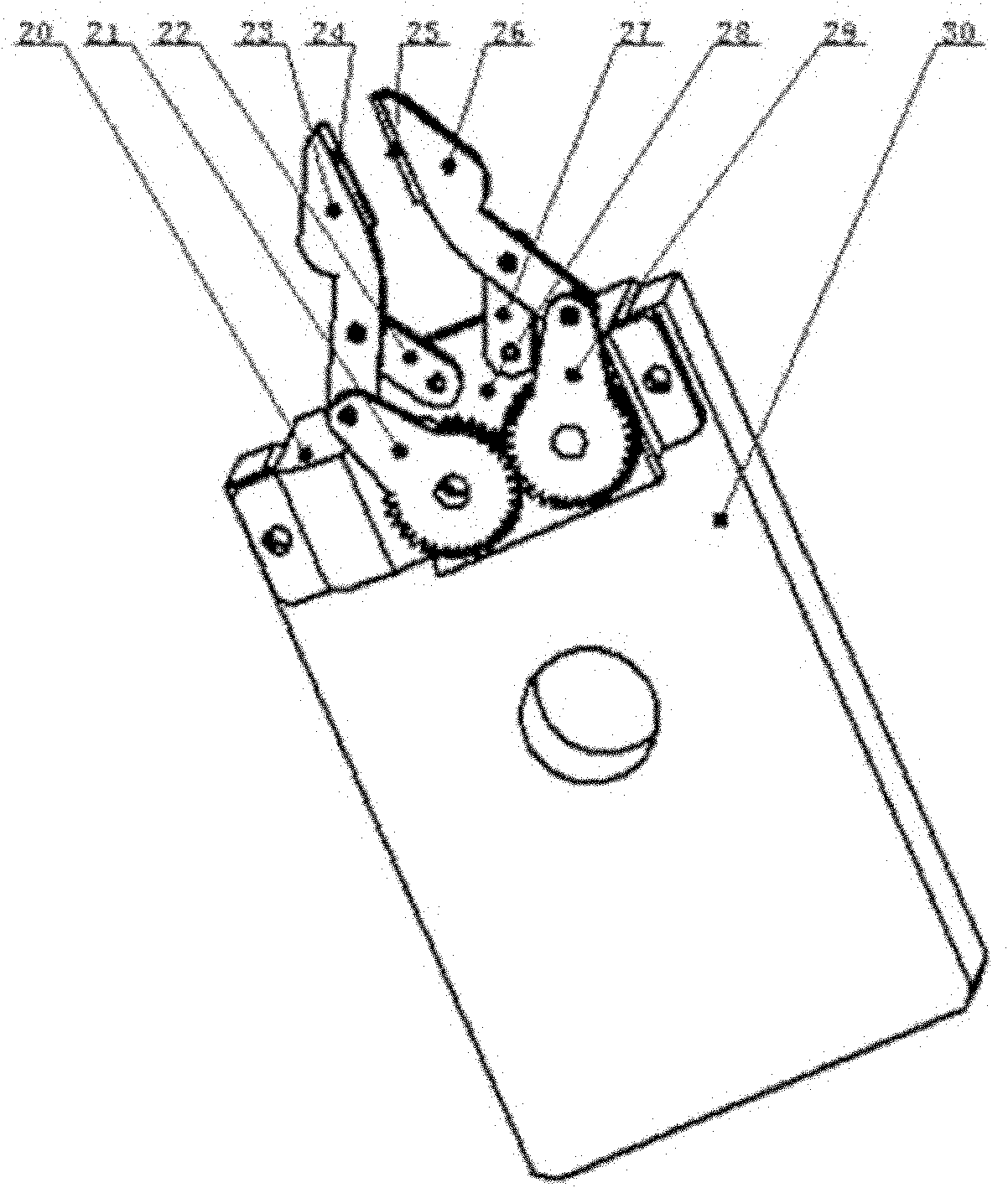
[0020] includes an axial feed component for advancing the catheter or guidewire and a circumferential rotation component for changing the direction of rotation of the catheter or guidewire;
[0021] The circumferential rotating parts include a rotary module stepping motor, a pair of external gears, a front rotating disk, a rear rotating disk, and a connecting rod; the front rotating disk and the rear rotating disk are connected by the connecting rod to form a rotating cylinder, The rotary module stepper motor drives the rotary cylinder through the external gear;
[0022] The axial feed component includes two axial feed modules symmetrically fixed on the front rotating disk and the rear rotating disk, and the axial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More